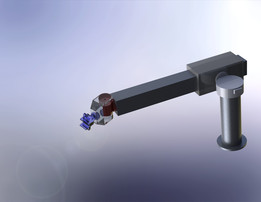
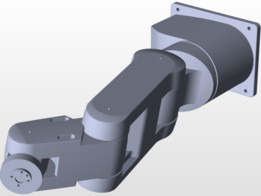
串联机械手臂
用于机械设备,农业机械等自动化设备,结构上首先要考虑自由度的问题,也就是工作空间范围的问题,自由度越多结构和控制系统越复杂,目前市场上销售的机械手以2~6个自由度的为多,当然,一般需要有3个自由度以上的才能称为机械手,3个或3个以下的一般称为坐标机器人。 除了自由度之外最重要的就是精度和刚性问题(后者在多自由度机械手中非常重要),前者关系到工作准确性,后者则关系到工作时的负载大小及速度


- 模型大小 :11.24 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :


用于机械设备,农业机械等自动化设备,结构上首先要考虑自由度的问题,也就是工作空间范围的问题,自由度越多结构和控制系统越复杂,目前市场上销售的机械手以2~6个自由度的为多,当然,一般需要有3个自由度以上的才能称为机械手,3个或3个以下的一般称为坐标机器人。 除了自由度之外最重要的就是精度和刚性问题(后者在多自由度机械手中非常重要),前者关系到工作准确性,后者则关系到工作时的负载大小及速度