串联循环
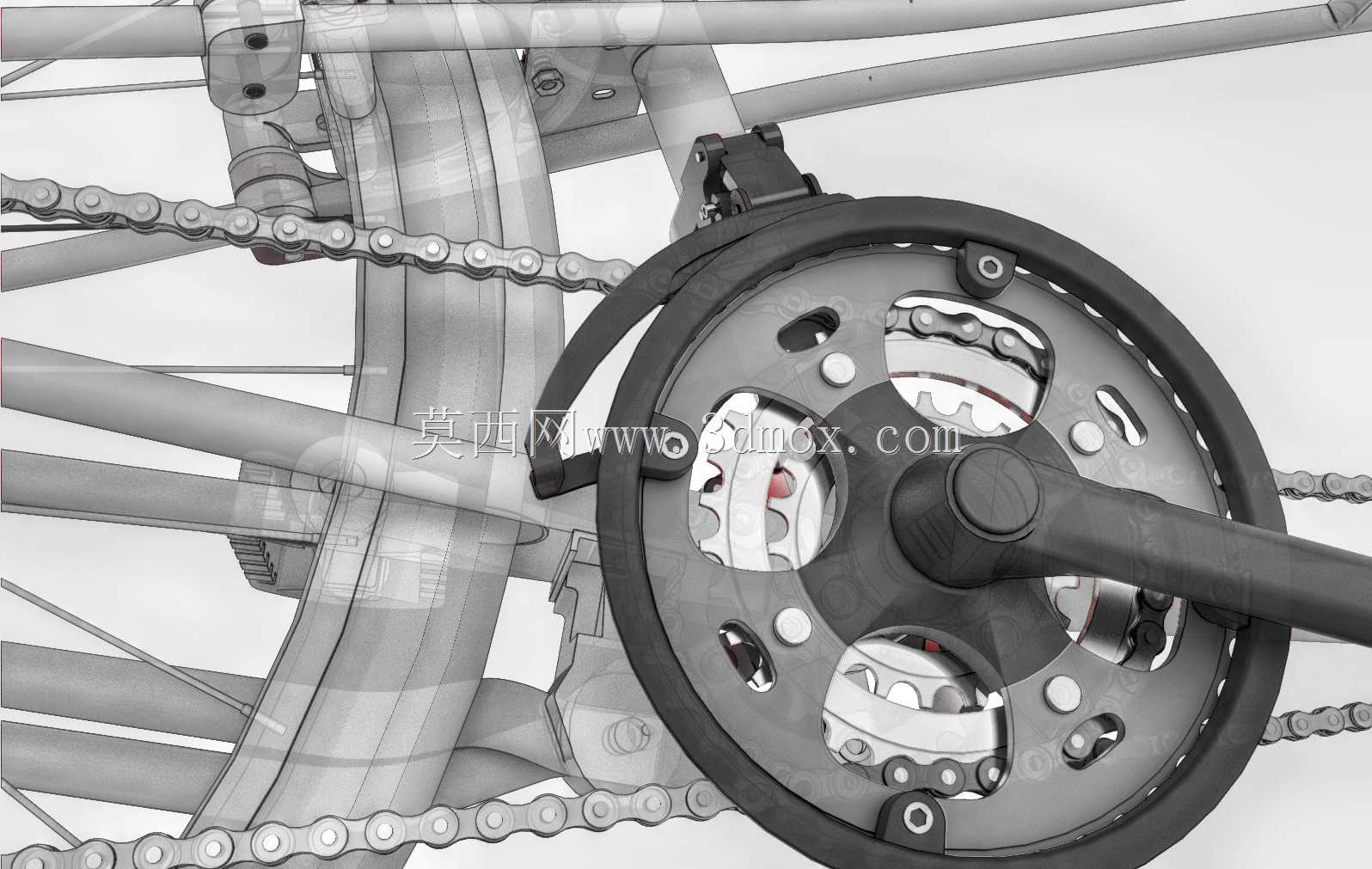





大规模的串联自行车转换,因为他们的速度快,他们的乐趣。命令是必不可少的和谐骑在前后车手之间的串联体验。最好用相似的语调说出所有的命令,这样后面的车手就可以分辨出正常对话和命令之间的区别,在仍然转动曲柄以便换挡的同时。巡航-在相同的踏板位置(对我们来说是右脚向前)停止踏板并滑行。减速-停止踏板(巡航位置)并缓慢踩下制动器。停止-立即踩下制动器,并尽快停止踏板运动(巡航位置)可能,准备好了吗前或后车手提出的一个问题,用来宣布他们已经准备好了,正等着从一个静止的位置骑起来。颠簸-允许后车手通过从马鞍上卸下一些重量来为路面凹陷做好准备。冲向颠簸-对踏板施加尽可能大的动力,以形成橙色的灯或交通间隙


- 模型大小 :189.02 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :OBJ,STL,Rendering