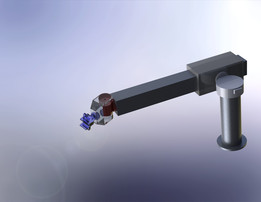
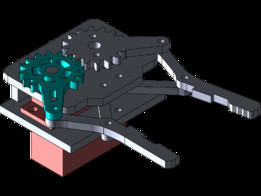
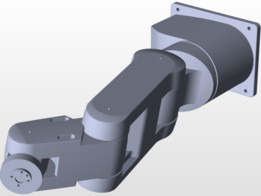
机械臂的生成性设计





机械臂由有限元分析和生成性设计生成。该项目是我在机械工程中的论文的一部分。有效载荷:100kg材料:铝合金AlSi10MW重量:5,2kgArm尺寸(cm):10x10x75I使整个论文可以在grabcad上下载(不幸的是,只有葡萄牙语)。请随时与我联系(danillo-soares@live.com)技术的指数级增长改变了我们交流、创造甚至生活的方式。不仅如此,这一进步还扩大了生产和工业能力,使我们能够更有效地跨越障碍和解决问题。这些变化改变了我们设计结构的方式,使我们不再局限于传统的几何学,而是有办法生成更复杂、有机的几何学,达到更好的效果。此外,先进的数值方法使我们能够预测这些结构的行为,并对其进行优化,以获得最佳的成本效益比。这项工作的目标是,以教育的方式,提出一种发展arobotic arm的动态方法:结构的迭代设计。要实现此目标,请使用Fusion360?, 以机械臂为例,模拟了机械应力的3种分析方法:静态应力分析、几何拓扑优化和生成性设计,第一种是有限元法。在每一组模拟的最后,对模拟结果进行了分析,并以最佳阻力重量比为目标,对几何结构进行了优化。这些迭代一直持续到获得符合项目初始标准的几何图形为止。此外,为了实现拟议的教学目标,工作主题的组织方式应明确过程的必要基础,然后,在项目结束时,对获得的结果进行了讨论,介绍了结构的关键方面和这类设计过程。关键词:结构分析,迭代设计,有限元法,AutodeskFusion360More信息库
标签:


- 模型大小 :32.47 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Other,Rendering