FRC团队1991龙-第一个通电机器人







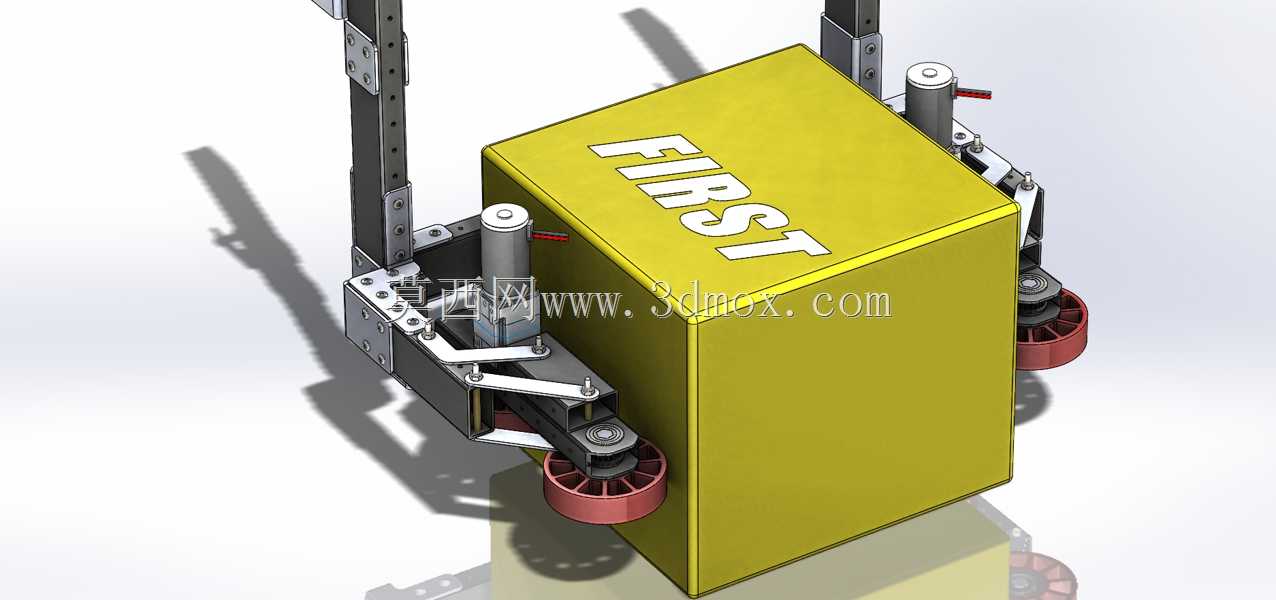

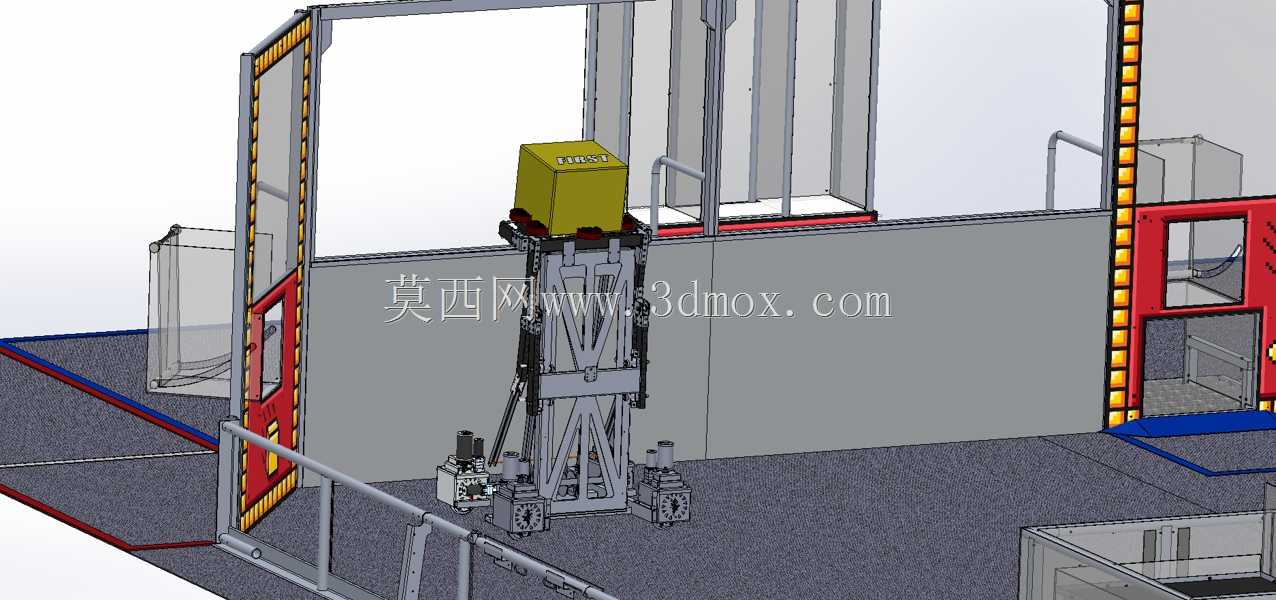
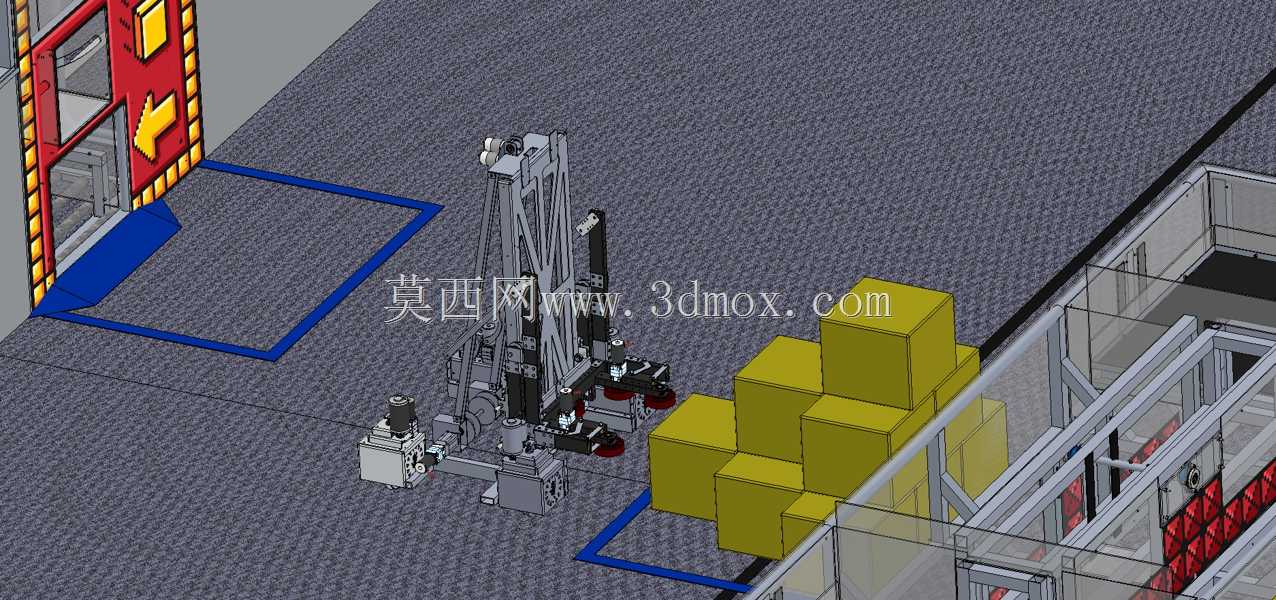
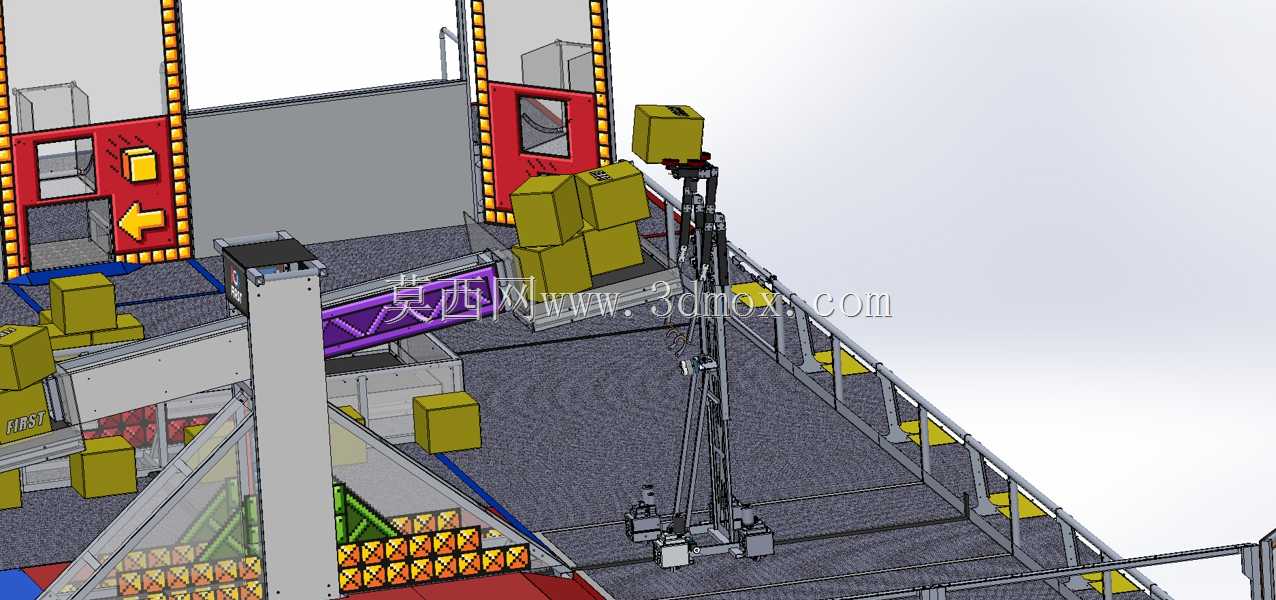

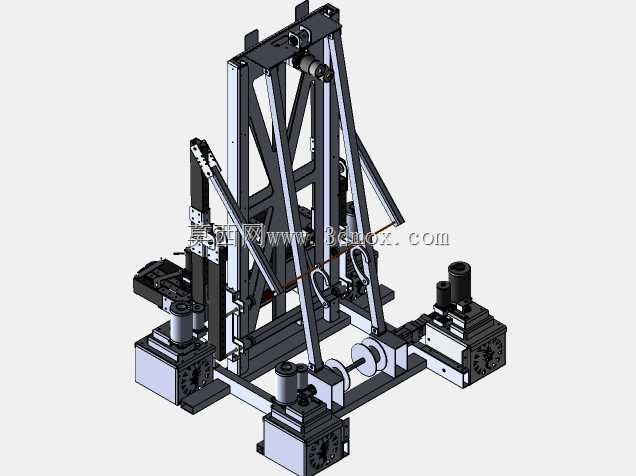

这是我的机器人团队为2018年首次加电比赛准备的机器人(有关该机器人的详细信息,请单击“显示更多…”我们使用SolidWorks 2017 3D CAD作为该机器人的主要计算机辅助设计软件。作为一个团队,我们每个人都在机器人上使用SolidWorks设计一个元素,并将它们组合成一个组件来创建我们的机器人。我作为首席设计工程师(学生)的角色是领导设计/CAD团队设计一个专为竞争而优化并适合制造的机器人。我还用季前训练团队中的其他学生如何使用SolidWorks。有关我们的更多信息:https://team1991.comchannel/UCPo0HSI_RKmutuLvsCoKSAg/featuredhttps://www.instagram.com/frcteam1991/https用法:/github.com/FRC1991*********************************************有关Robot:Our robot 它由三个主要部件组成:传动系、进气口和升降机。机器人上的大部分部件都是由0.125英寸6061铝合金制成,铝合金经过激光切割,并在液压制动器中弯曲。通过使用这种方法,我们能够巩固大部分的部分,使一切作为一个单一的部分,所以我们所需要做的就是把螺母和螺栓。驱动器Train:Our chassis 是建立在一个模块化的转向驱动系统。每个轮子模块都可以独立地转动和驱动,使我们能够“平移”,以及进行传统坦克驱动无法执行的急转弯和各种其他机动。这使我们能够更快、更轻松地定位机器人。转弯驱动的多功能性使得它在进攻和防守上都非常出色。模块的设计基于VexPro VersaSwerve。我们对它进行了重新设计,这样模块就被封闭起来了,电机就在机器的顶部/更靠近机器ntake:Our intake 通过“伸手抓取”采用独特的吸入方法。该系统使用蹦极和进气轮。该系统还可以上下翻转,以扩大机器人所能达到的高度。翻转运动由滑轮驱动。我们把翻转运动和攀岩机结合起来,这样两个部件就可以在一个马达上运行。它是通过一个系绳(未显示)来实现的,系绳缠绕在攀岩绞车上,并延伸到攀岩钩的底部。最后,我们解决了我们的问题与“伸手抓取”的方法,并通过削减重量,使其由塑料管levator:Our elevator 采用链条驱动的舞台和滑轮驱动的进料小车的独特组合。电梯还提供由绞车驱动的爬升钩。绞车的功能还包括为进气系统提供俯仰(向前倾斜)运动。这种设计允许我们在天平倾斜不利于我们的情况下,将3个立方体堆叠在一起(我们也可以在开关上放置许多立方体)。注意:模型中缺少一些硬件,并且存在一些轻微干扰。请注意,这并不反映实际机器人的构建。所有的干扰和硬件都考虑到了真实的机器人


- 模型大小 :124.42 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,Other,Rendering