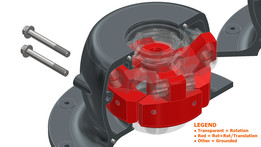
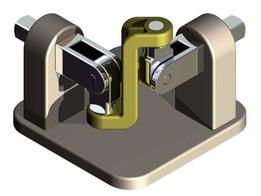
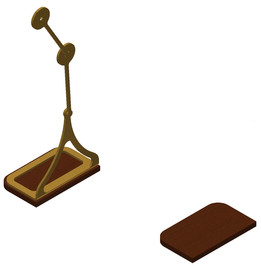
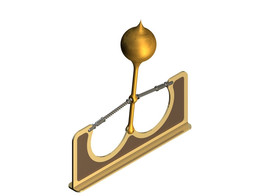
擒纵机构-防滑爪解决方案
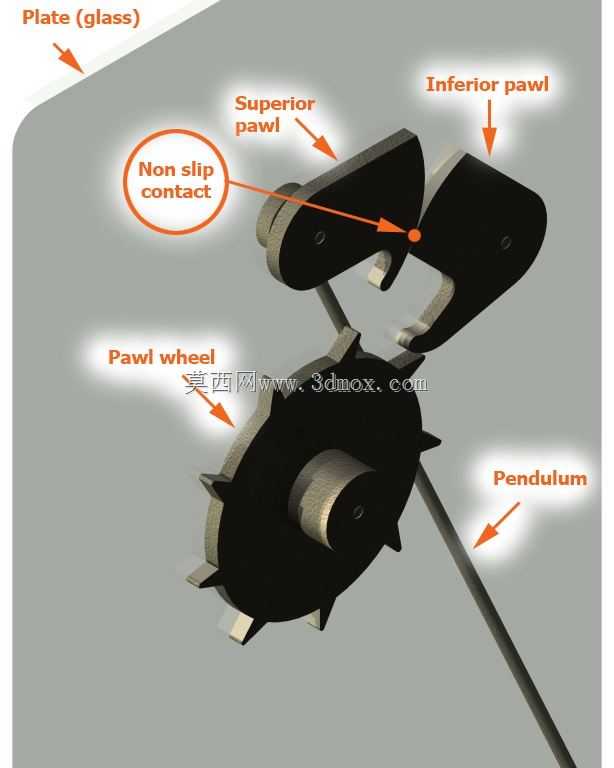








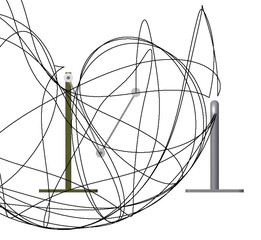
擒纵机构在机械界是非常令人兴奋的,本文介绍了一种仅由4个运动部件组成的擒纵机构:一个棘轮(也可作为卷轴)和两个无摩擦“啮合”的棘爪,其中一个棘爪与第四部分-摆成一个整体。该机构应该由挂在缠绕在卷筒上的绳子上的重物驱动,但重量和绳子不存在,它们的作用被顺时针方向施加在棘爪轮上的1.5 N・mm的恒定动量所代替。模拟以慢动作显示,1:17分钟的实时播放时间为3:21分钟。实时时间由屏幕上的实际时钟确认。值得注意的是,摆锤的振幅在第二个6(实数)处收紧。也就是说,动能等于摆锤势矩的能量,那么力矩将永远保持运动――如果不考虑摩擦力的话。在6秒到8秒之间(实数),会有一个变焦,它会详细显示擒纵是如何发生的。你可以自己实验所有的动态感觉。打开Inventor Professional 2014(或2015)下载目录中的“擒纵-防滑爪解决方案.iam”文件,然后进入环境/动态模拟。模拟播放器对话框将出现在屏幕上。单击播放按钮并观看移动。到达终点后,单击对话框中最左边的按钮(构造模式),并稍微更改摆锤的位置。再次单击“播放”按钮并观察更改的运动。要查看机构的装配情况,请看:https://youtu.be/ejIkzTq_tmIHere 真正的建筑是我自己做的:https://youtu.be/HRWEBJaDFXEThe 使用Inventor 2014对机构进行建模,并使用Inventor中包含的动态仿真模块获得生成的动画专业2014


- 模型大小 :2.58 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Autodesk Inventor,Rendering,Autodesk Inventor,Rendering,Autodesk Inventor