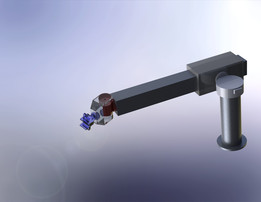
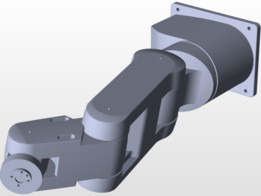
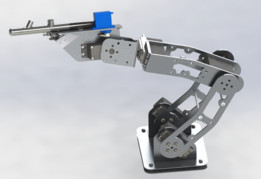
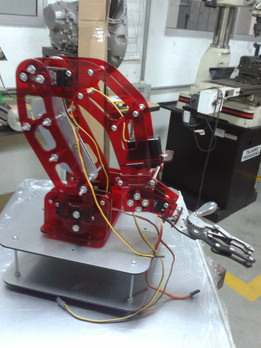
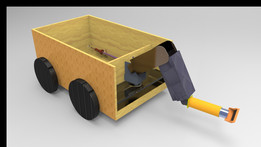
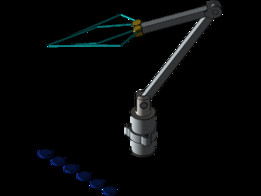
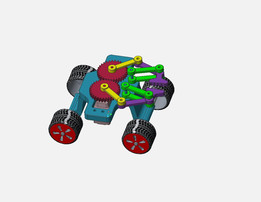
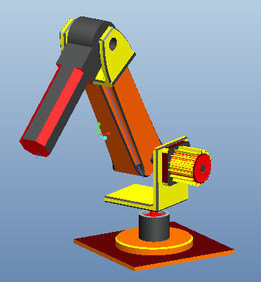
带夹持末端执行器的机械臂




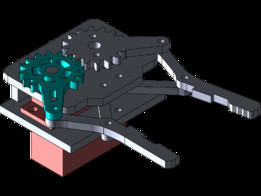
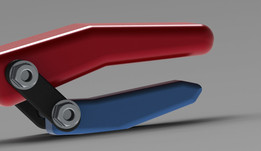
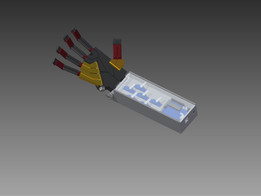
旨在优化回收设施的团体机器人项目的最终产品。该模型由一个机器人手臂组成,设计用于根据物体的颜色对其进行分类。部分included:- Workbench (隐藏空间中):用于图像处理的固定相机的结构。-4 d.o.f.(RRRR)机械臂,带夹持末端执行器。末端执行器和腕部之间的连接设计为可以将末端执行器更改为具有相同固定设计的不同末端执行器。臂的底部包括两个部分之间的圆形轨道,形成它,在那里我们放置直径1厘米的弹珠作为球轴承。-电机CAD模型:我们使用MG995和SG90伺服电机。设计用于二维激光切割,最后在4mm木贴面上实现(视频链接如下)。这是在预算非常紧张的情况下完成的(70欧元,不包括覆盆子皮和相机)。整个系统都上传了,但galery只展示了整个系统的产品、夹具和几个部分实例


- 模型大小 :7.67 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA