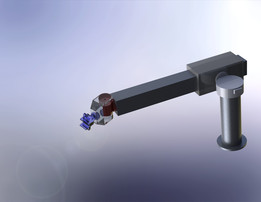
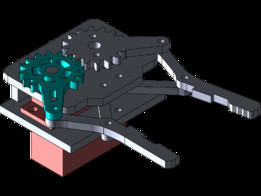
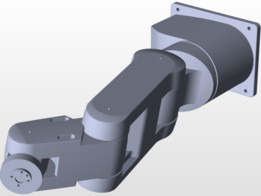
机械手SCARA(选择性柔顺装配机械臂)










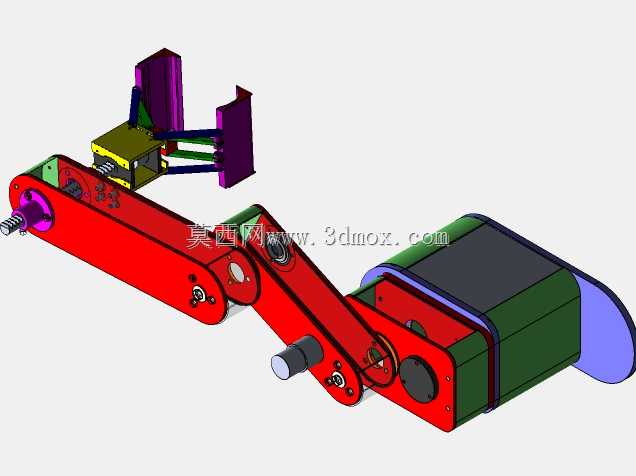

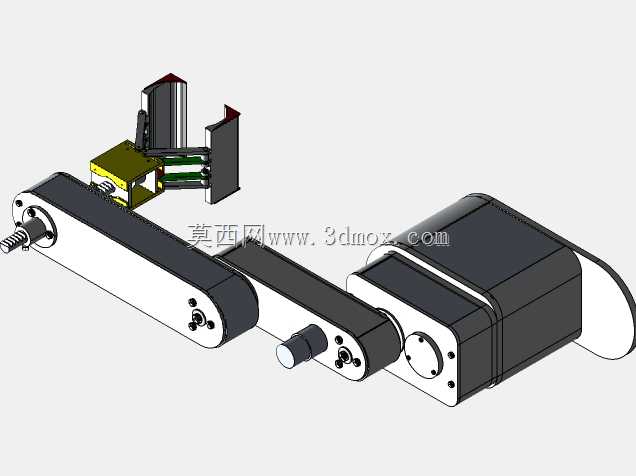
这是我的研究生项目,(我是我的合作伙伴雅各布)我们正在创造一个新的机器人设计SCARA(选择性顺应装配机器人手臂)机器人,也被称为“水平关节臂机器人”,是一个成功的故事自动化。有四个自由度,他们可以自由地定位和加入每一个可能的水平方向有效载荷。SCARA原则:简单可靠SCARA机器人的设计类似于人的手臂,因为它们有一个只能水平摆动的关节臂。通常,它们有四个可自由编程的轴,允许在平面平行面上操作。轴用于安装工具,并可从其垂直运动中独立旋转,以在工作包壳内自由定位产品。由于他们的设计,斯卡拉斯具有较高的垂直刚度


- 模型大小 :13.52 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering,SOLIDWORKS,Rendering,STEP / IGES,Rendering