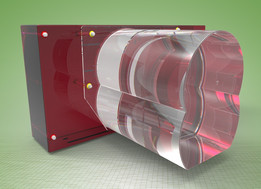
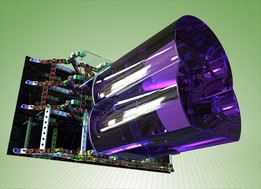
自由度
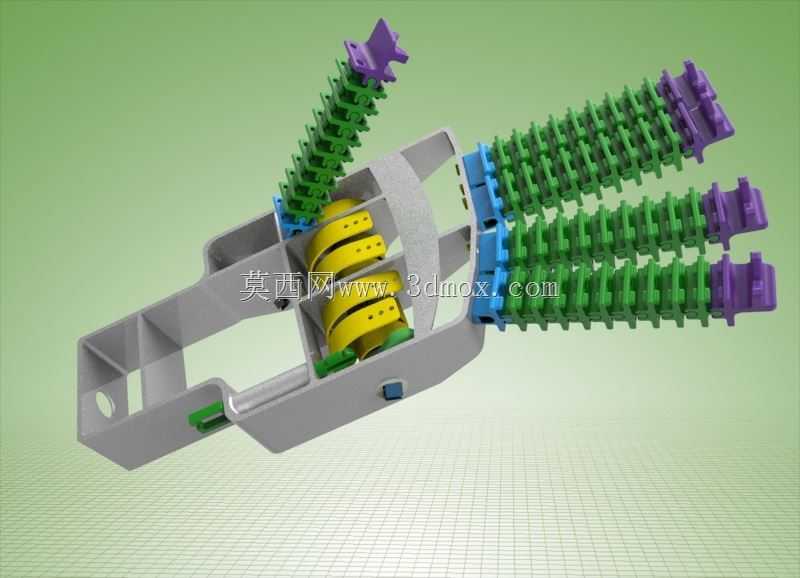
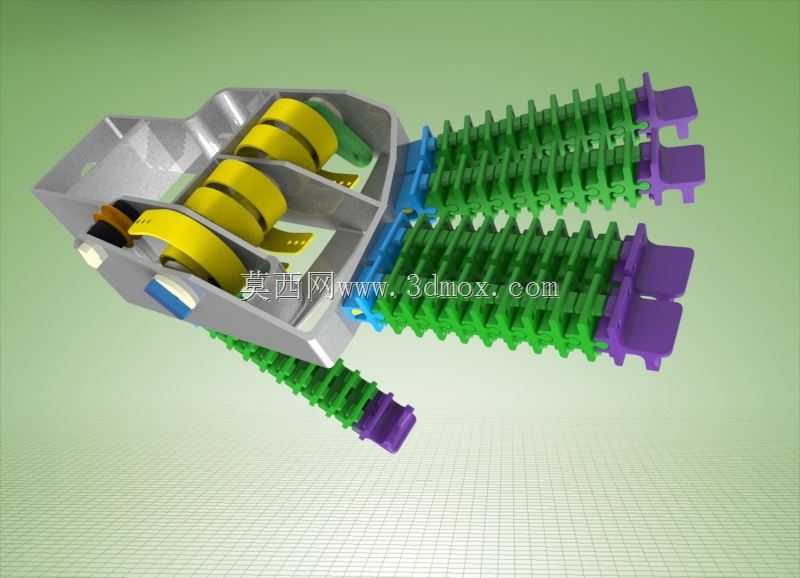
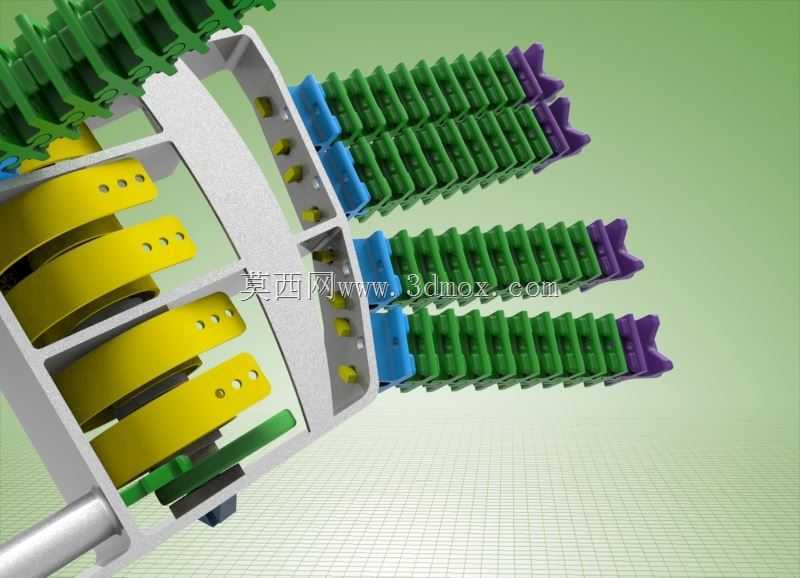
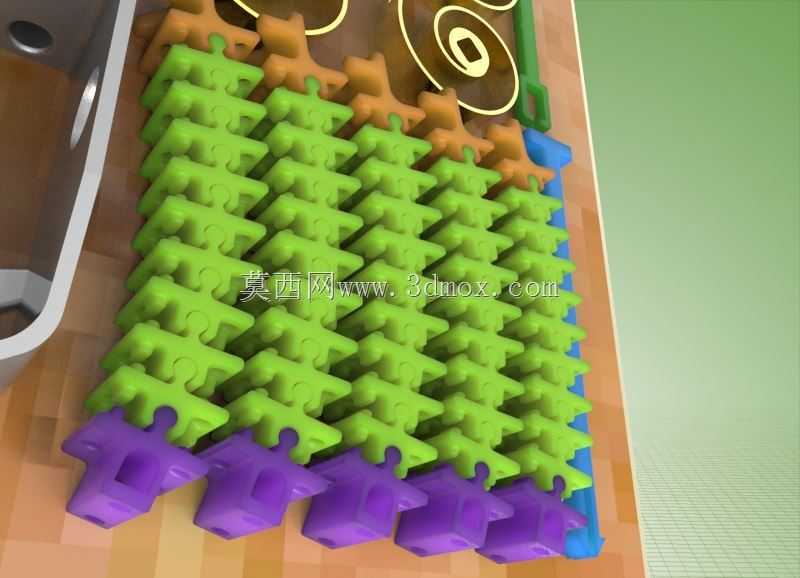
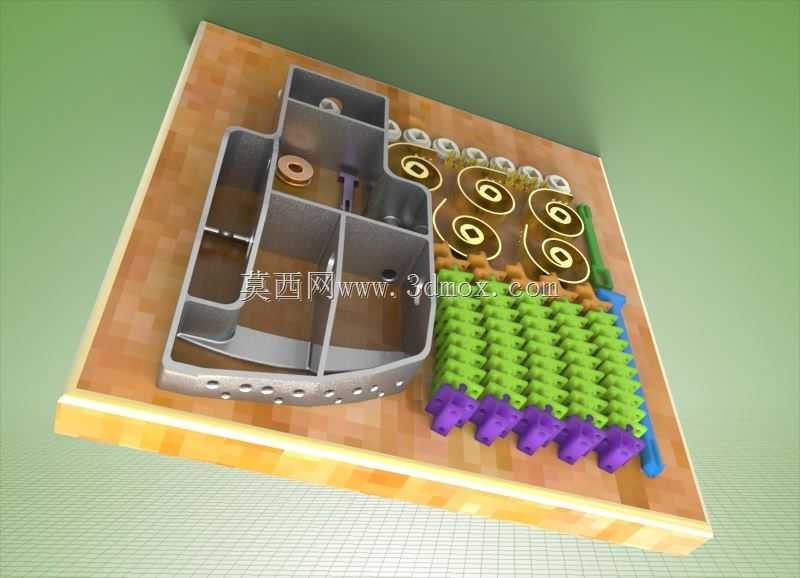
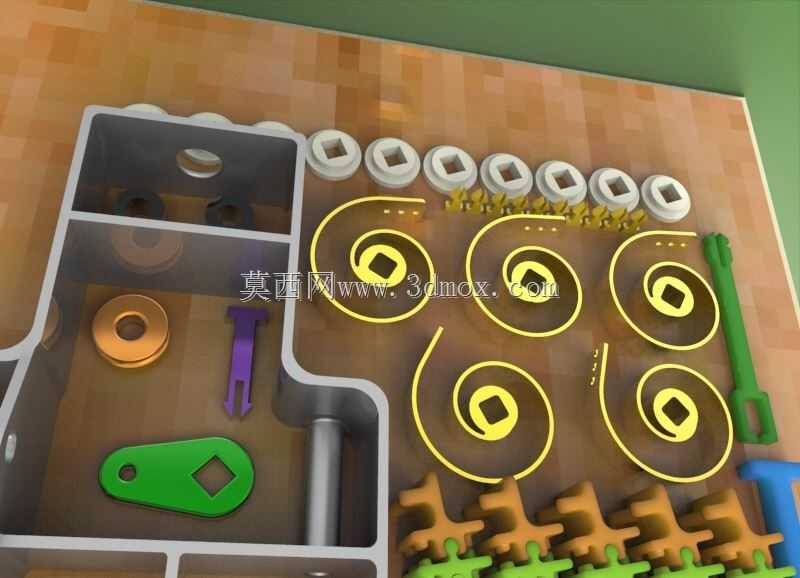
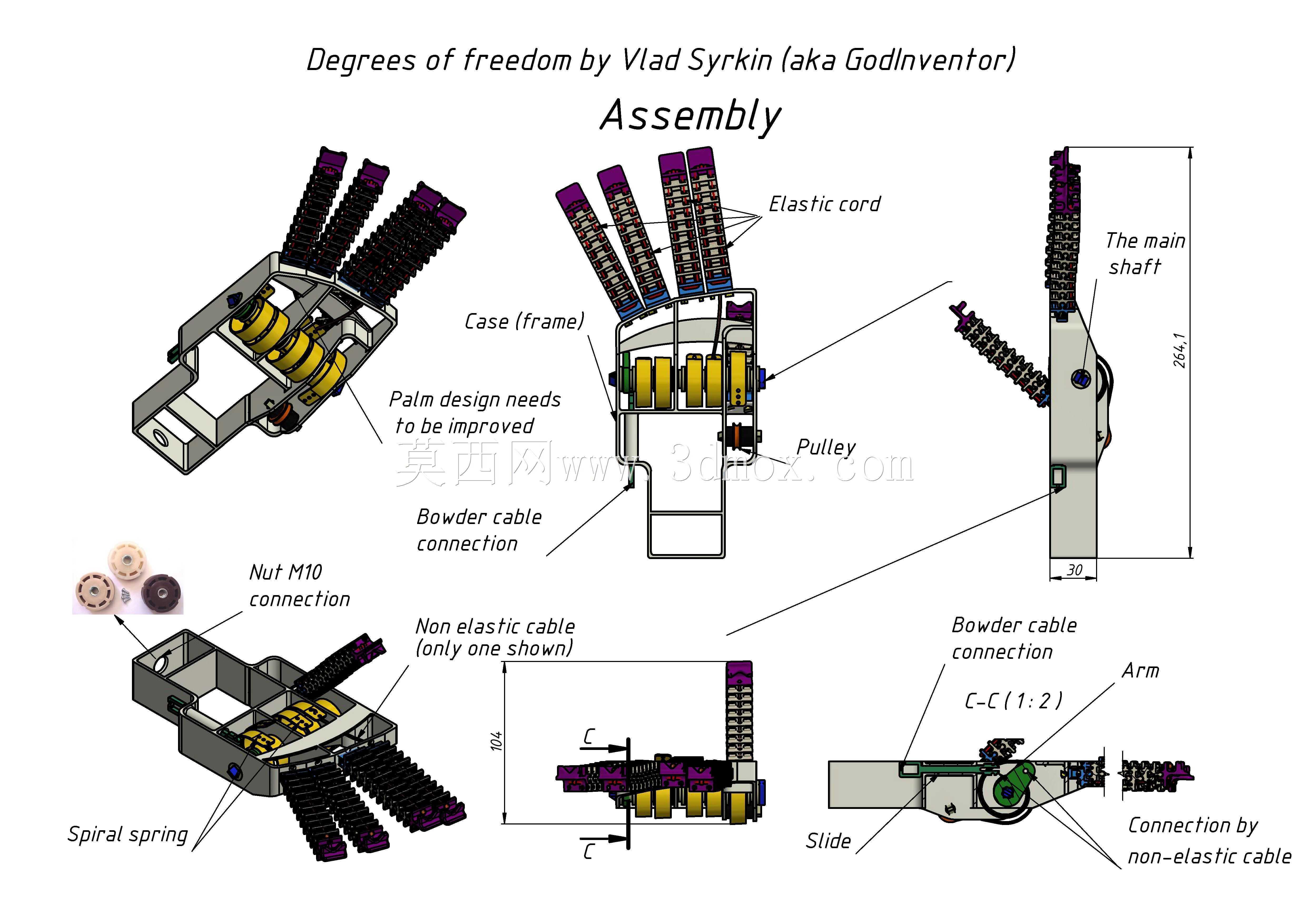
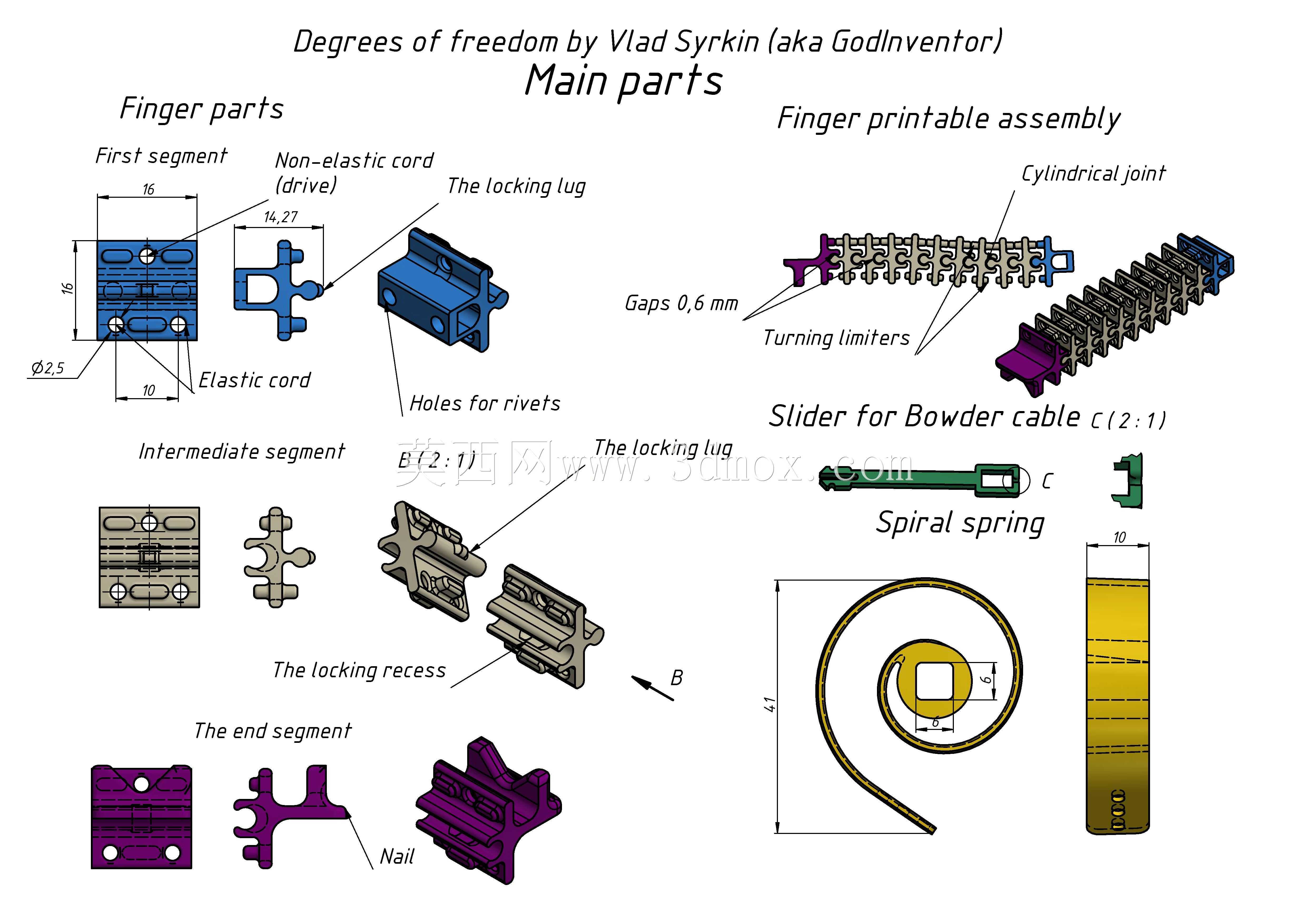

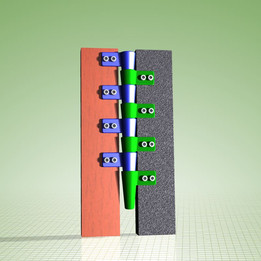
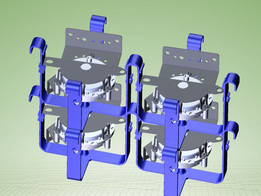
现有假体的缺点(a)缺乏对物体形状的适应性,因此需要为不同类型的手术更换终端。由于与驱动机构的刚性连接,我们会产生以下负面影响:第一个手指一接触到物体,其他手指的运动就会受阻。b)。第二个问题,从第一个问题开始:固定假体的能力与电缆上的力不成正比。我们无法确定受试者是否被牢固捕获。c)。猛禽型假肢更适合快速捕获小物件(如网球)。它们不能提供大的握持力(IMHO)。我们如何解决这些问题?最完美的解决方案:使用液压系统,该系统包含灵活的手指、可弯曲的流体压力、pamp、阀门、反馈传感器、控制器。这样的系统将非常昂贵。但我们可以对液压系统进行近似的机械模拟。关键思想是提供额外的自由度,以确保适应性。第一个自适应元件-手指。由于设计原因,手指能够捕捉不同形状的物体,类似于自行车链条。每个手指可以向手掌侧弯曲20度。弯曲提供的非弹性电缆,通过两根弹性电缆返回到中间位置。手指可以完全打印。第二个自适应元件-螺旋弹簧。当手指接触物体时,电缆移动将其弯曲并覆盖物体。力很小,螺旋弹簧的直径几乎保持不变。弹簧仅随物体一起旋转主轴。弯曲后,电缆的进一步移动会导致弹簧直径减小,并使固定物体的力成比例增加。如果手指未接触物体,不使用第二自由度。根据物体的形状,每个手指可能有一个单独的运动和力。这个想法是在概念层面上产生的。需要进一步改进和生产准备


- 模型大小 :96.13 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Other,STL,Rendering,Other,Rendering,Other,Rendering,Other,Rendering