美国宇航局扶手夹
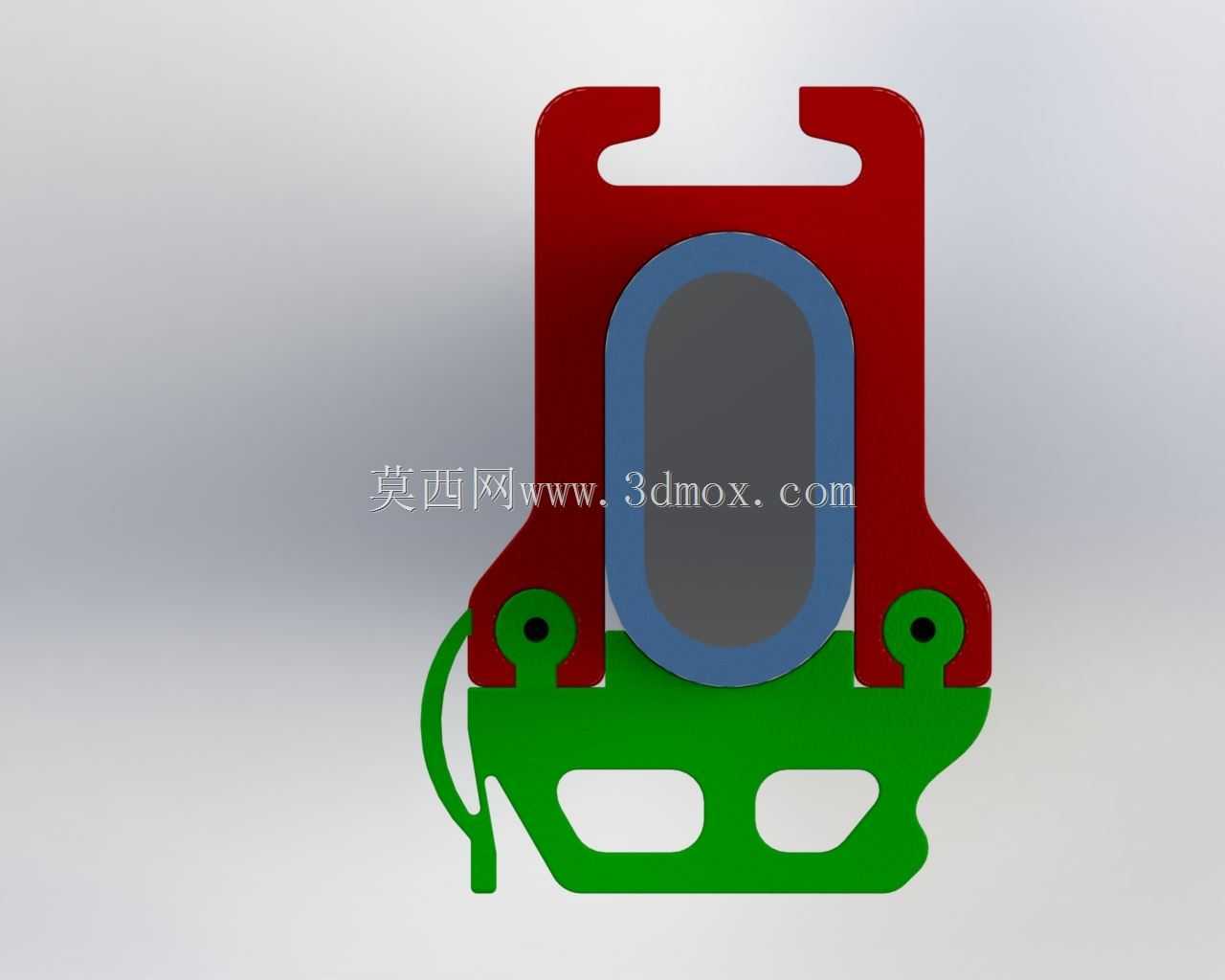
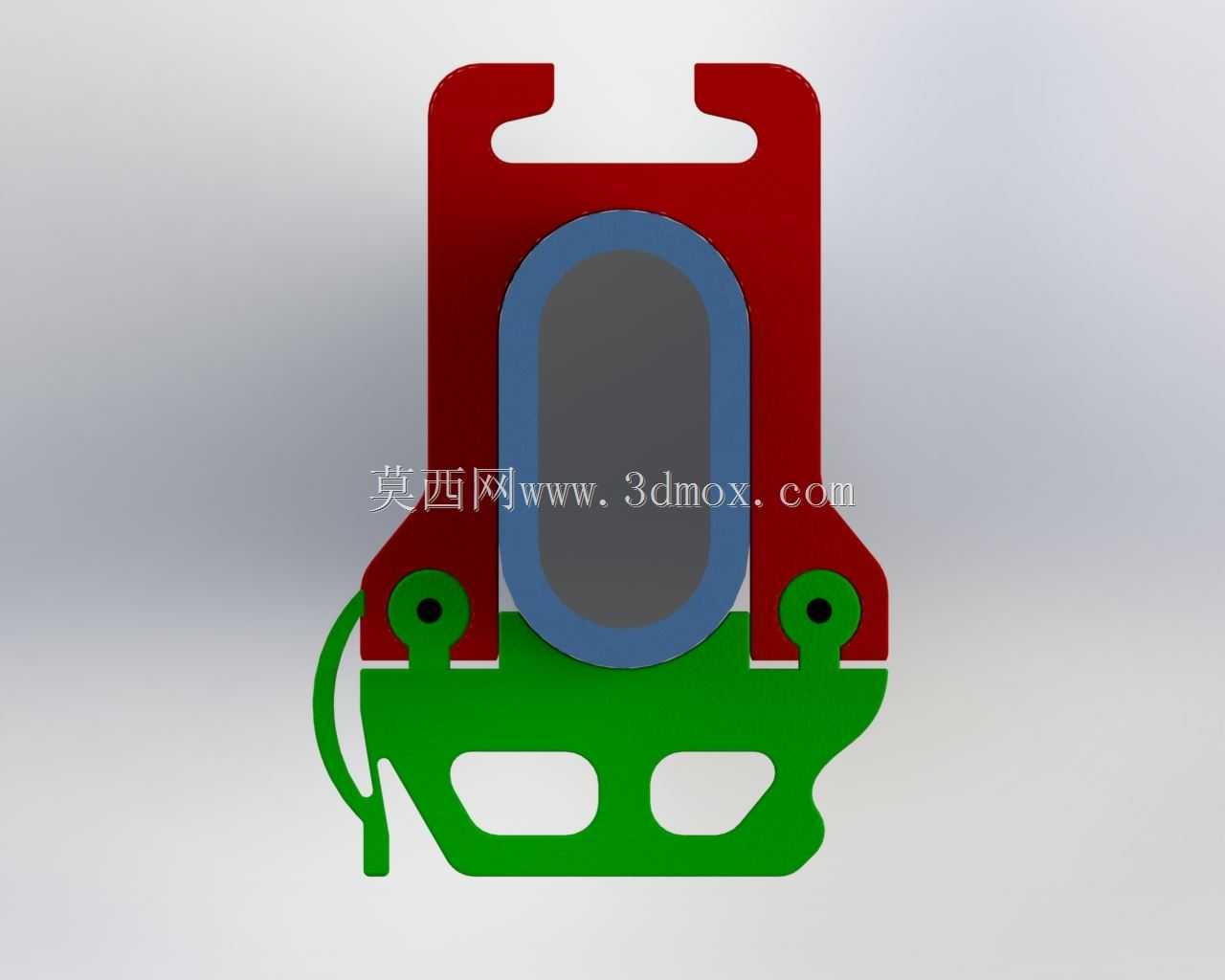
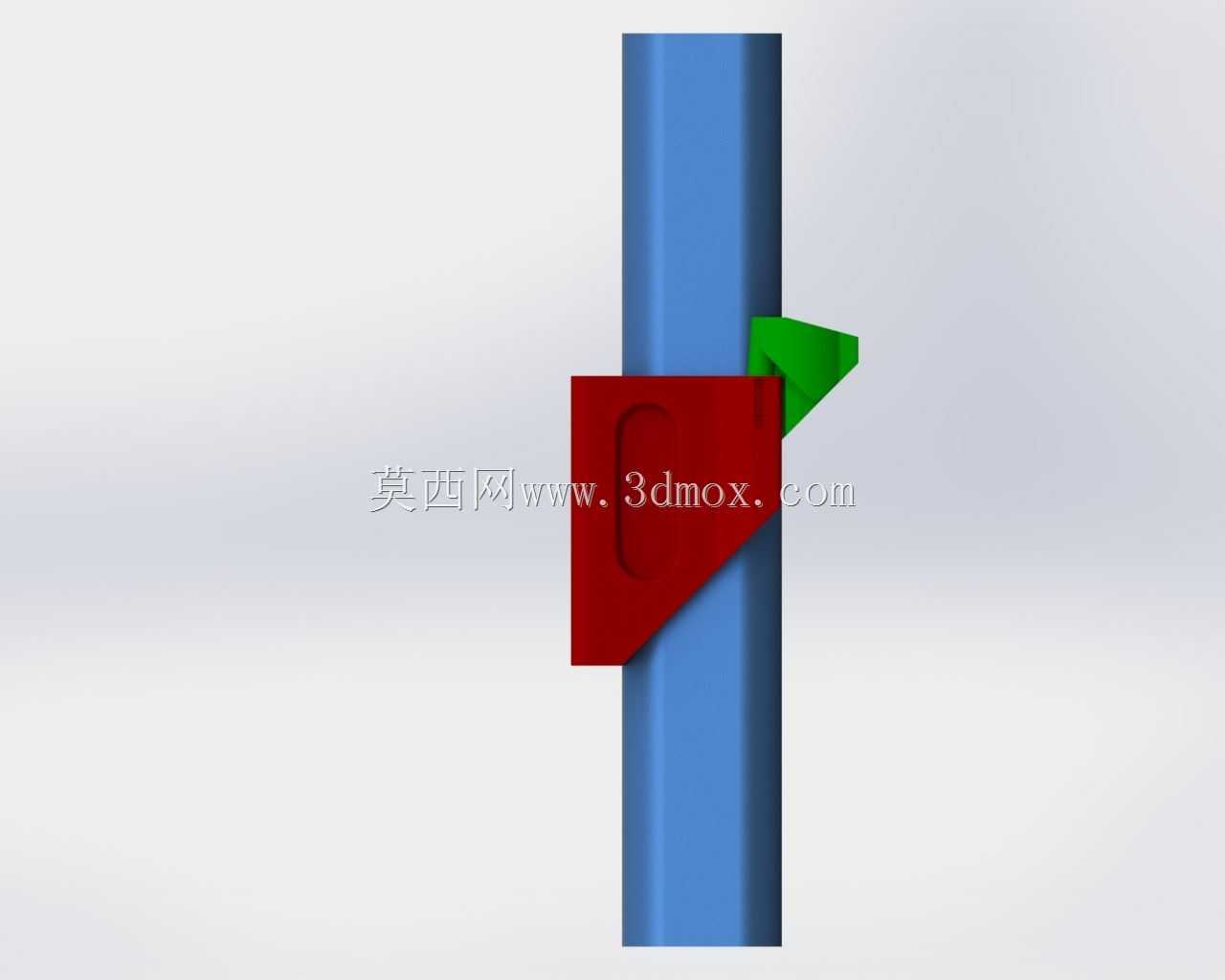




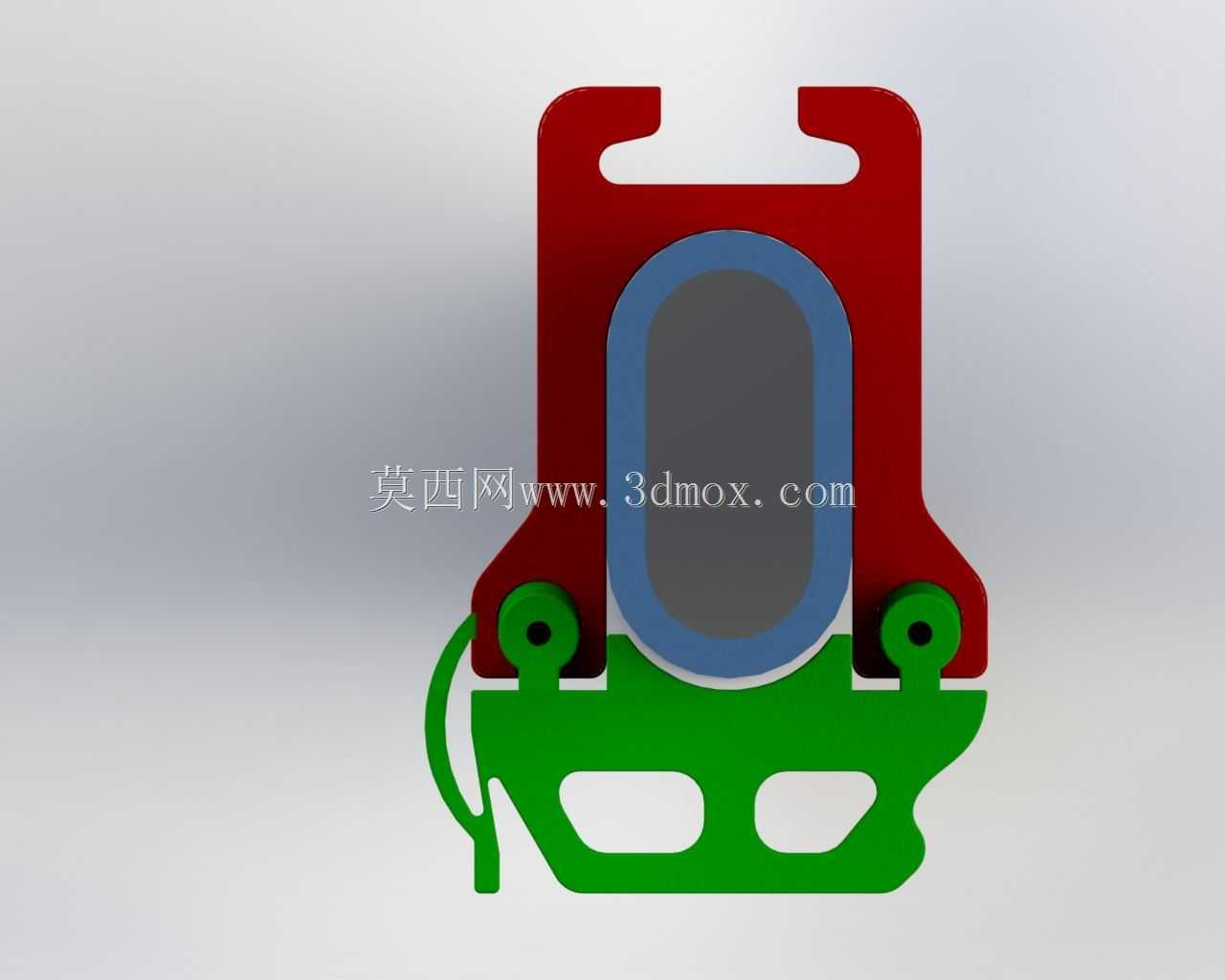
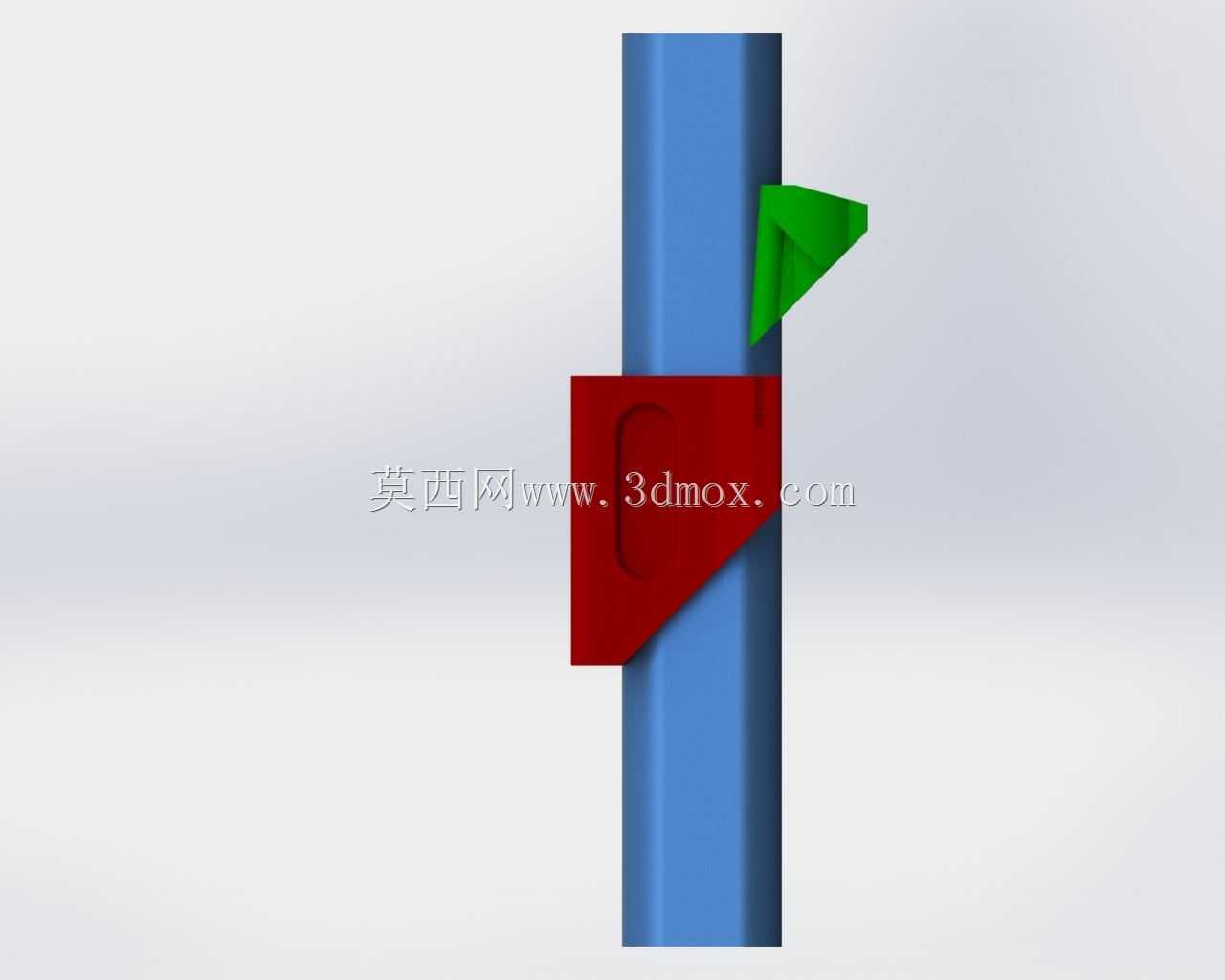

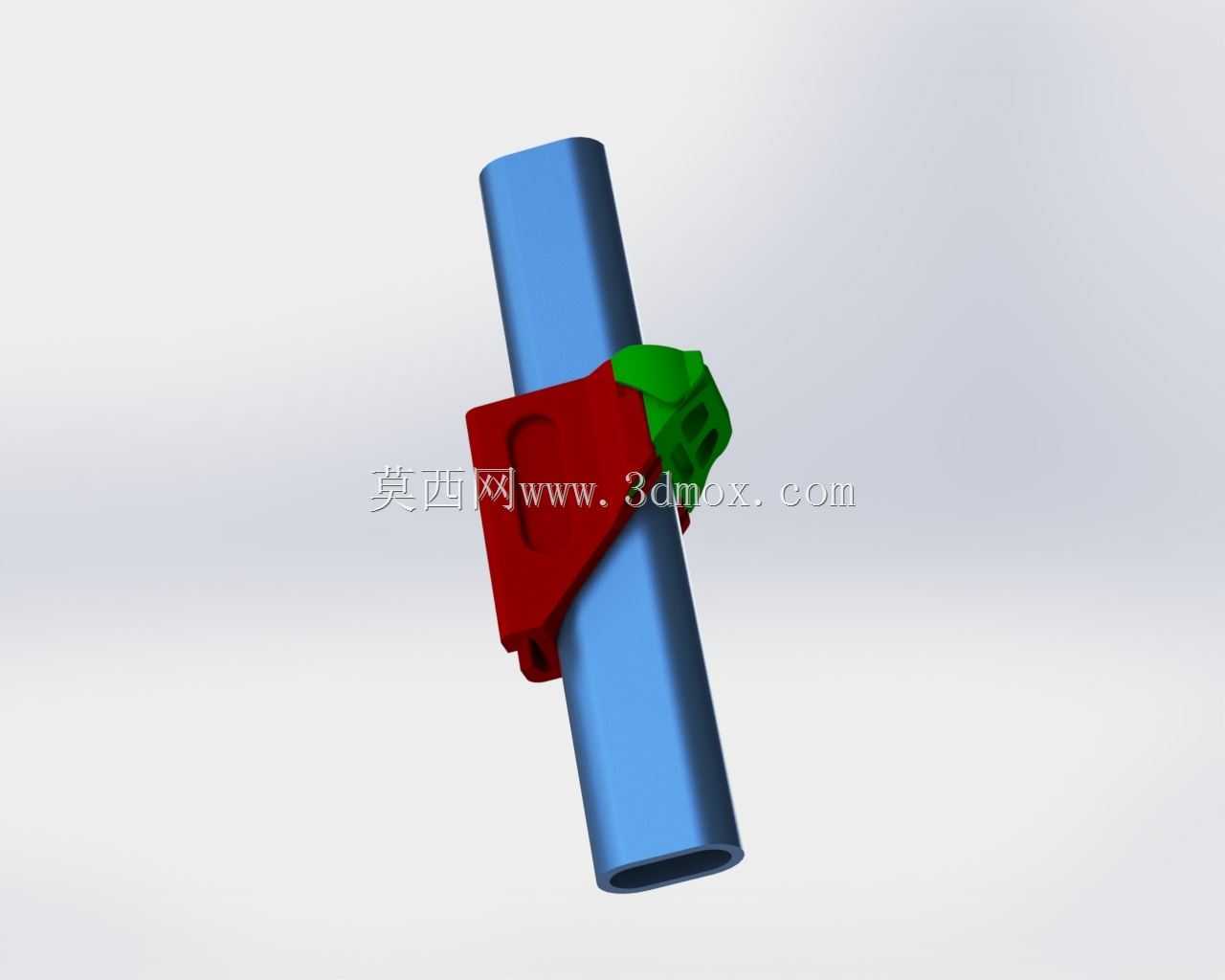

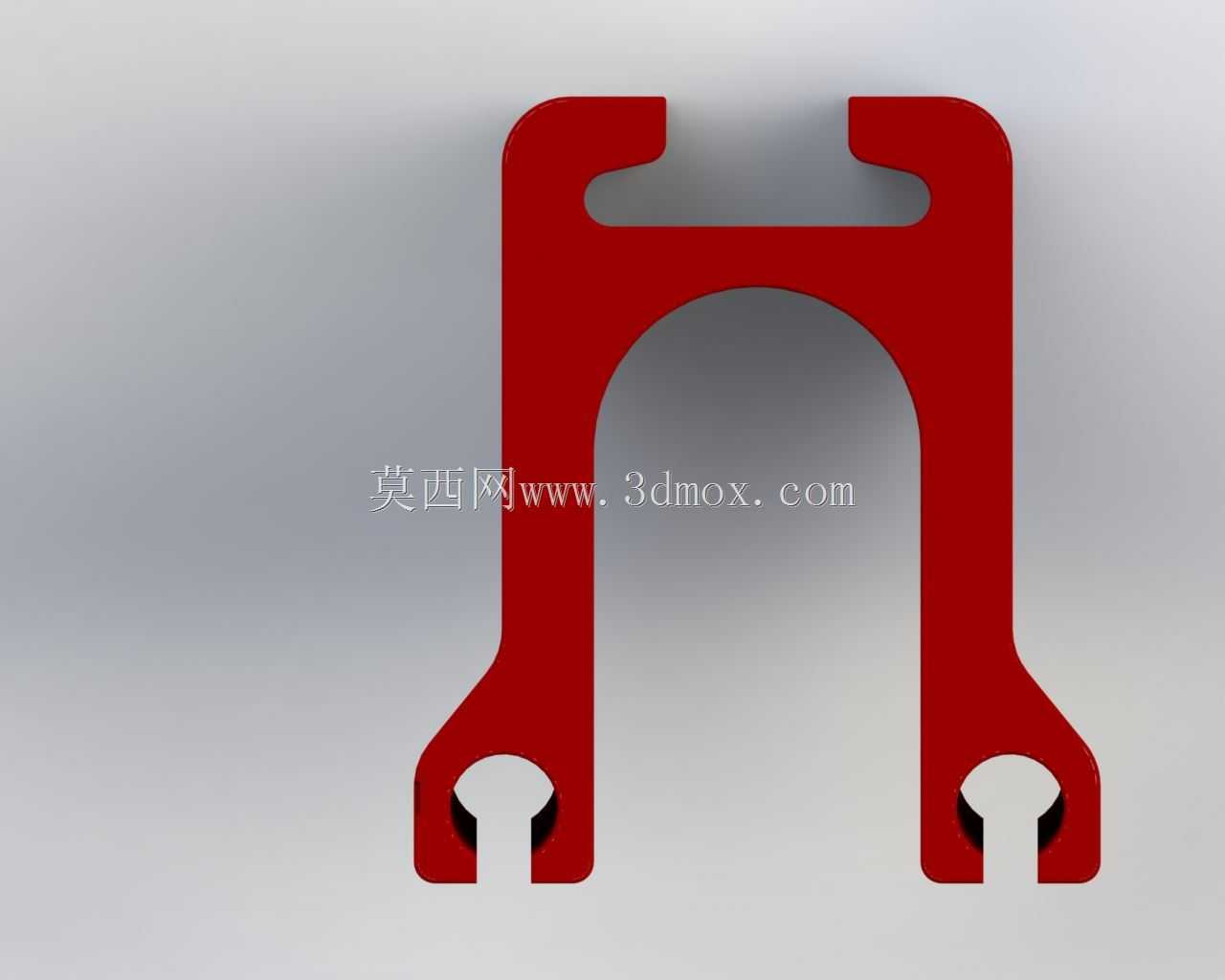

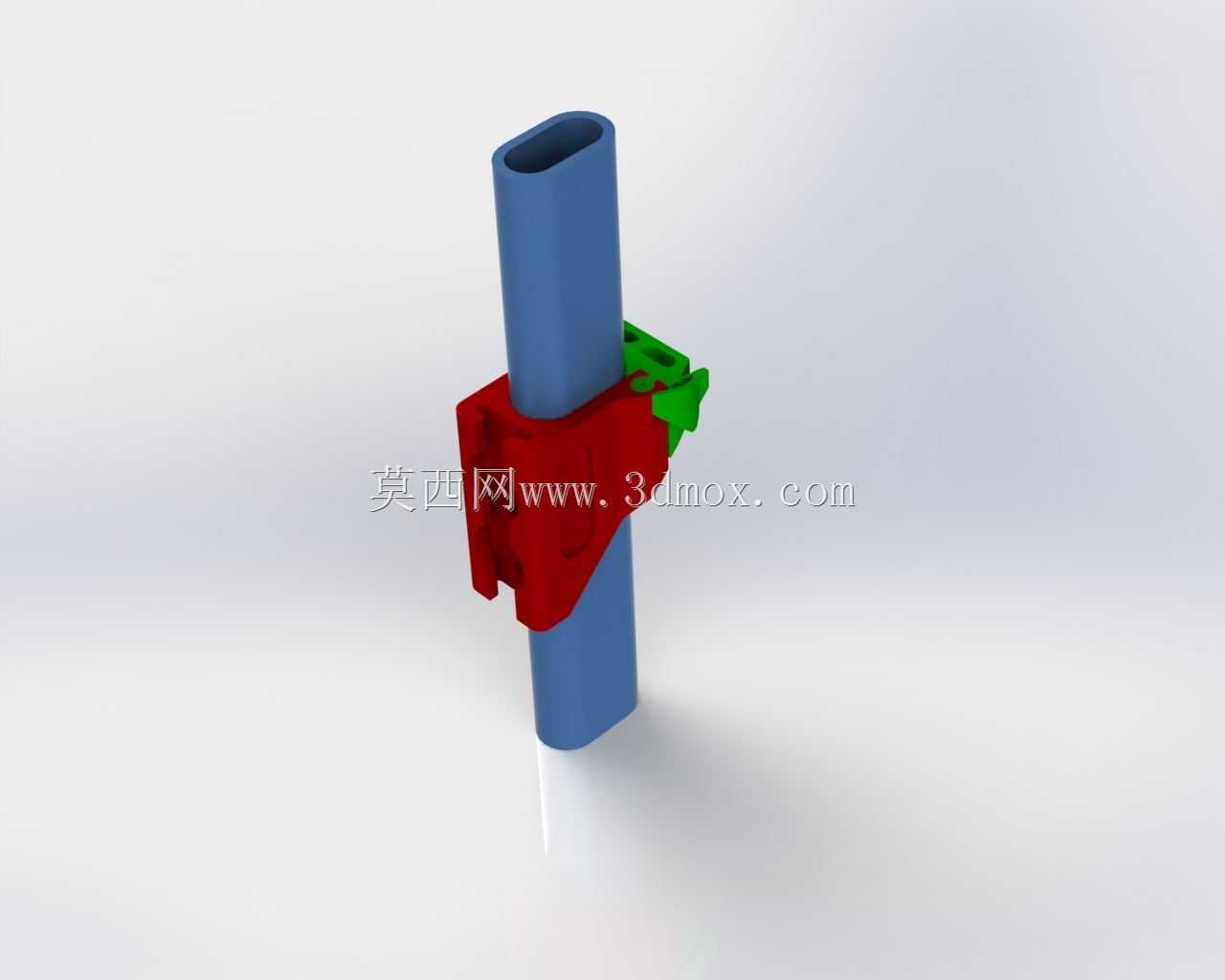
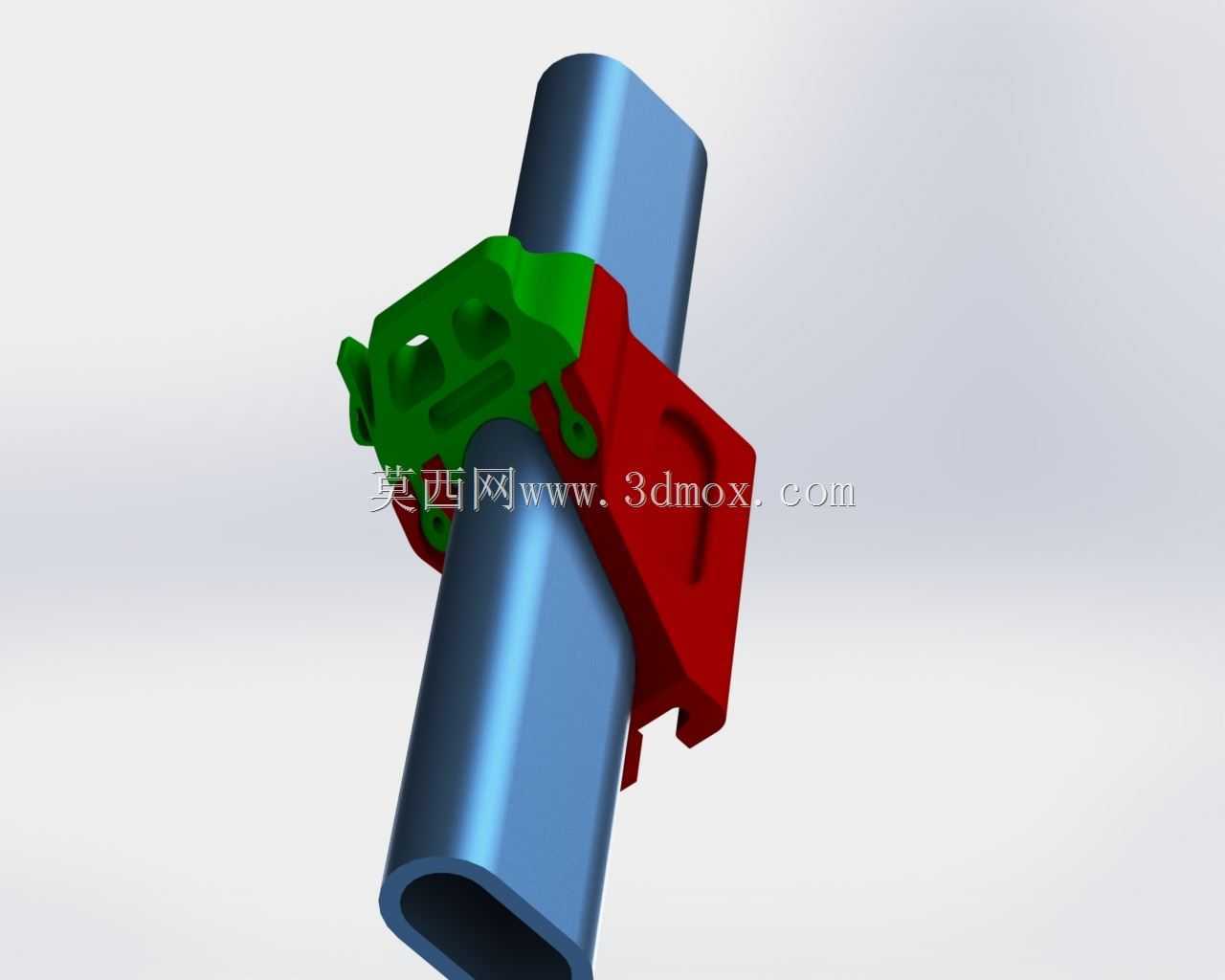
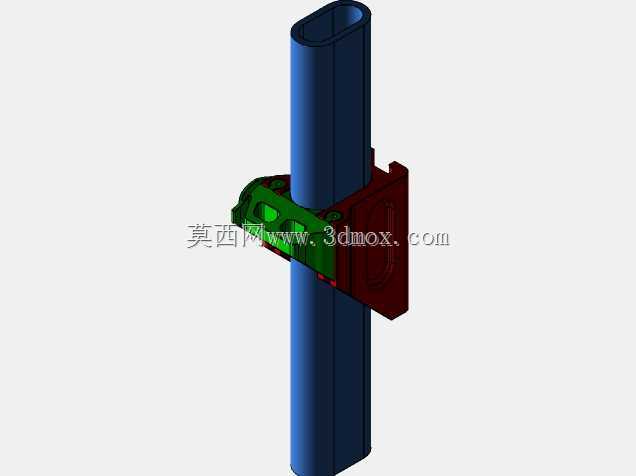











美国宇航局的扶手夹把灯分成两块,两块亮度相同,可以相对滑动。通过匹配固定所需的压力来创建。Angula花边,确保其压在管道上质量特性nosepieceMass=0.03 kg体积=30299.38立方毫米表面积=15703.45平方毫米质量中心(mm)X=20.16Y=36.11Z=-27.70惯性主轴,以及从质量中心测得的主惯性矩(kg*平方毫米)。Ix=(0.00,0.92,0.39)Px=8.36I=(0.02,-0.39,0.92)Py=14.69Iz=(1.00,0.01,-0.01)Pz=14.77惯性矩(kg*平方毫米),在质量中心获得,并与坐标系结果对齐。Lxx=14.77 Lxy=0.00=0.00 LXZLyx=9.31=0.00=2.26 Lyzzy lzx=0.00=2.26 Lzz=13.74惯性矩(kg*平方毫米),从输出坐标系测量。Ixx=78.79 Ixy=22.50Ixz=-17.26I和x=22.50=45.59 Iyy Iyz=-28.66IZX=-17.26-28.66 Izy=Izz=66.60后质量特性质量=0.01千克体积=10818.23立方毫米表面积=6643.76平方毫米质量中心(mm)x=18.98Y=45.68Z=2.43惯性主轴,以及从质量中心测量的主惯性矩(kg*平方毫米)。Ix=(1.00,-0.04,-0.03)Px=0.92I=(0.05,0.89,0.46)Py=1.95Iz=(0.01,-0.46,0.89)Pz=2.35在质量中心获得的惯性矩(kg*平方毫米)并与坐标系结果对齐。Lxx=0.93 Lxy=-0.04 LXZLyx=-0.04 Lyy=2.03=0.16 LyzLzx=-0.04 Lzy=0.16=2.26 Lzz从输出坐标系测量的惯性矩(kg*平方毫米)。Ixx=24.02 Ixy=9.53=0.47 IxzIyy i和x=9.53=1.39=6.07 IyzIzy IZX=0.47=1.39 Izz=29.27
- 上一篇:PROBOTIX COMET CNC路由器克隆
- 下一篇:柯尔特m1911手枪

- 全部评论(0)

- 模型大小 :29.02 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,STL,Rendering,STEP / IGES,STL,STEP / IGES,SOLIDWORKS,Rendering,STEP / IGES,STL,STEP / IGES,STEP / I