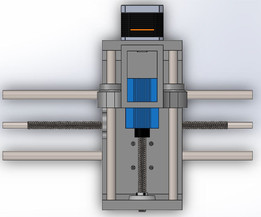
全地形机器人(摇臂转向架)
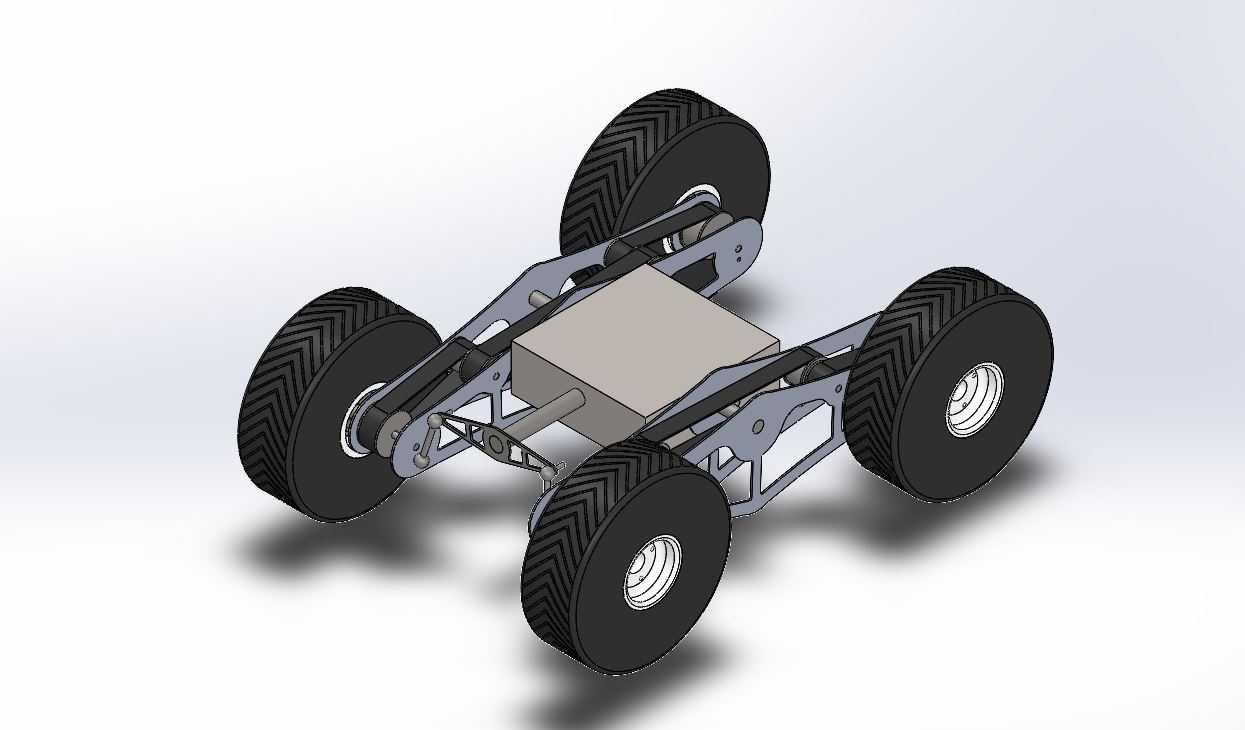
全地形机器人,使用摇杆转向架机构和滑移转向,在陆地上越过障碍物并保持平衡,即使其中一个车轮与其他三个车轮不在同一平面上
标签:


- 模型大小 :4.23 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS