韦奇冠军


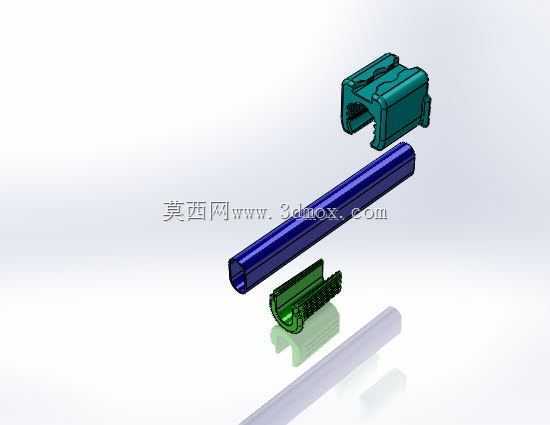


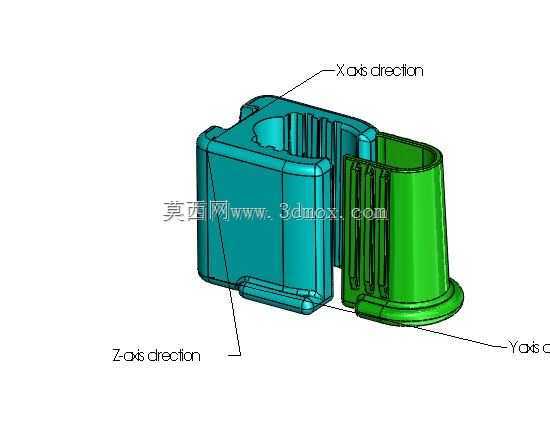
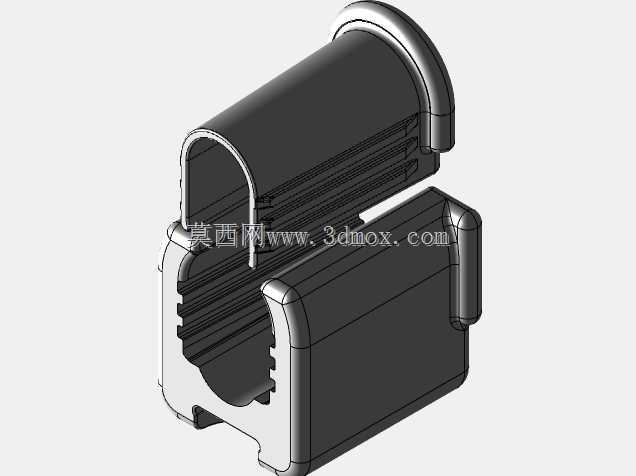


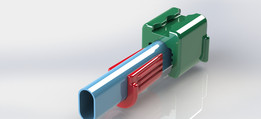
这种扶手夹的设计允许公差有很大的变化。夹紧机构的凸形部分很薄,以限制重量,但可利用大于1300lbf的抗压强度。凸形部分的尖端与导轨有非常轻微的过盈配合,从而与导轨形成轻微的卡扣配合。内螺纹部分刚好离开扶手,并沿扶手轴向滑动,以接合外螺纹锥形斜面。一旦接合,沿坡道的进一步轴向移动将增加凸形部分上的压缩力,从而在扶手和凸形部分之间产生越来越大的摩擦力。阴螺纹部分承受越来越大的压缩力和弯曲力。这是可取的,因为弯曲强度和压缩强度远远高于拉伸强度。拉伸应力无法完全避免,但可以最小化。构建方向是这样的:两个组件可以在一次打印中并排打印。3D打印的总估计重量小于100克。该构建方向进一步增强了联锁,因为每个打印层充当公部和母部之间的微锁定机制。这种夹具唯一的潜在困难是,如果楔子用力过大,将增加分离两个部件的难度。可以在设计中添加一个硬止动块,以限制过度压缩,但目前它不是硬止动块的一部分
标签:


- 模型大小 :10.33 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STL,Rendering,STL,Other,Rendering