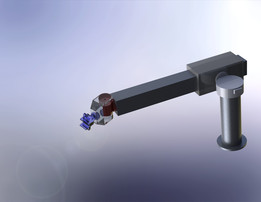
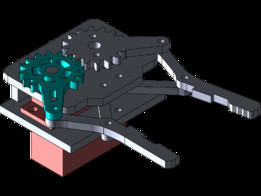
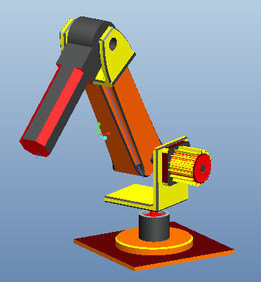
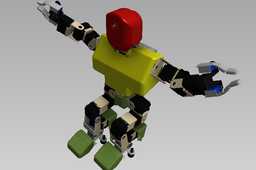
六自由度机械手臂
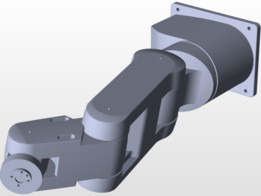
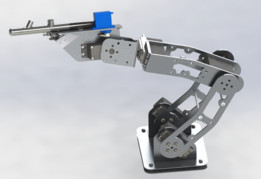
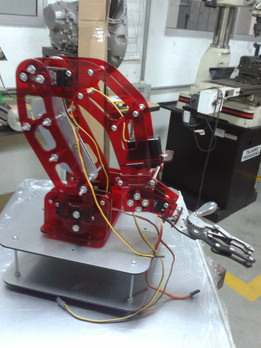
该机械手臂由底座,肩部,肘部,腕部组成,具有6自由度,底座主要完成整体的水平平面转动,其余的几个关节共同完成平面内的移动和相应转动,本模型为SolidWorks2010机械手装配运动图,图纸格式为prt,建议大家使用ug8.0及以上版本打开。大家可以下载学习交流。
标签:


- 模型大小 :650.01 KB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :

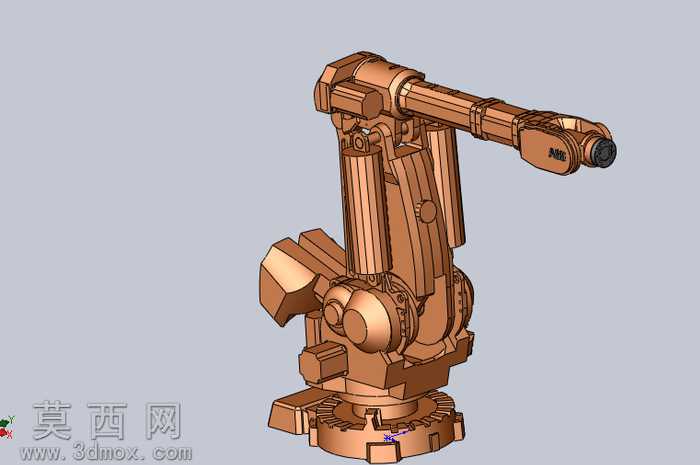
该机械手臂由底座,肩部,肘部,腕部组成,具有6自由度,底座主要完成整体的水平平面转动,其余的几个关节共同完成平面内的移动和相应转动,本模型为SolidWorks2010机械手装配运动图,图纸格式为prt,建议大家使用ug8.0及以上版本打开。大家可以下载学习交流。