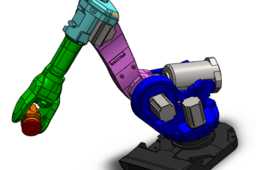
RC伺服机器人手臂-4DOF
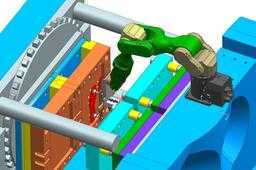
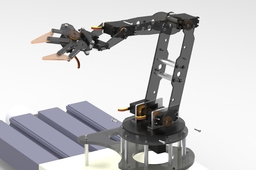
这里是旨在使用 RC 伺服系统建立完整的 4DOF 的机器人手臂。
另一个 reeeaaaallly 的旧3D模型-但嘿-这些都是我可以分享 !
* 你,欢迎使用此3D模型的个人项目、 效果图、 学习,等等。请不要转售或重新发布此3D模型。


- 模型大小 :4.71 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :



这里是旨在使用 RC 伺服系统建立完整的 4DOF 的机器人手臂。
另一个 reeeaaaallly 的旧3D模型-但嘿-这些都是我可以分享 !
* 你,欢迎使用此3D模型的个人项目、 效果图、 学习,等等。请不要转售或重新发布此3D模型。