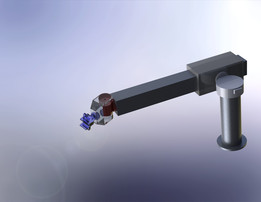
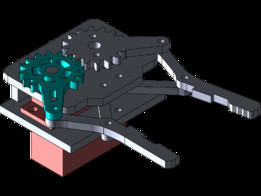
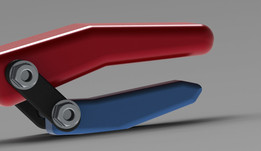
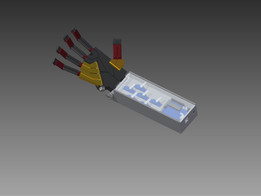
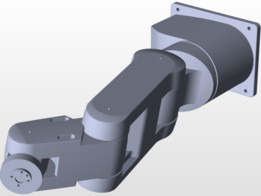
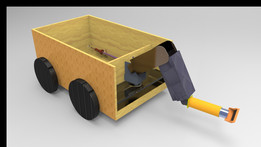
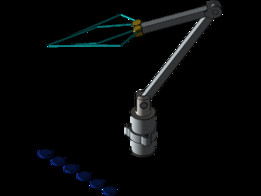
两爪机械手爪设计模型
两爪机械手爪设计模型作为机器人关键零部件之一,它是机器人与环境相互作用的最后环节和执行部件,其性能的优劣在很大程度上决定了整个机器人的工作性能。主要可分为三类:机械手爪,又称为机械夹钳,包括2指、3指和变形指;包括磁吸盘、焊枪等的特殊手爪;通用手爪,包括2指到5指。(AutodeskInventor绘制,包含参数,可以编辑的模型)
标签:


- 模型大小 :357.39 KB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :