ЗҜРОЛш
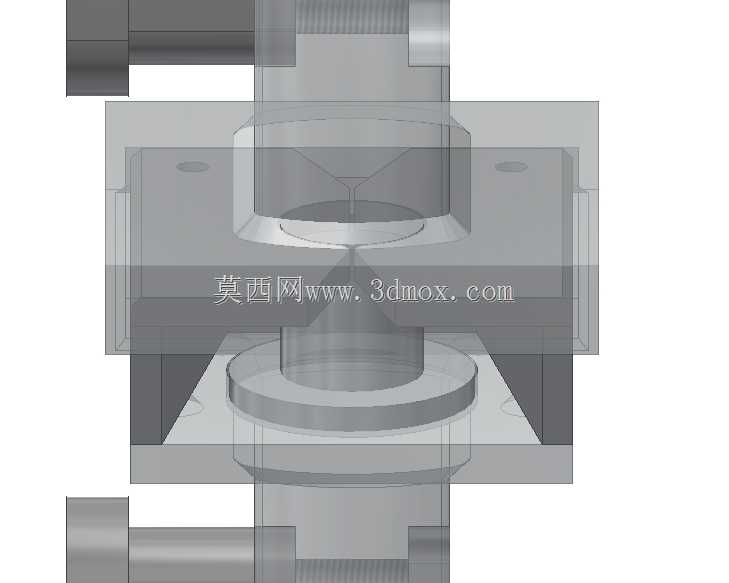

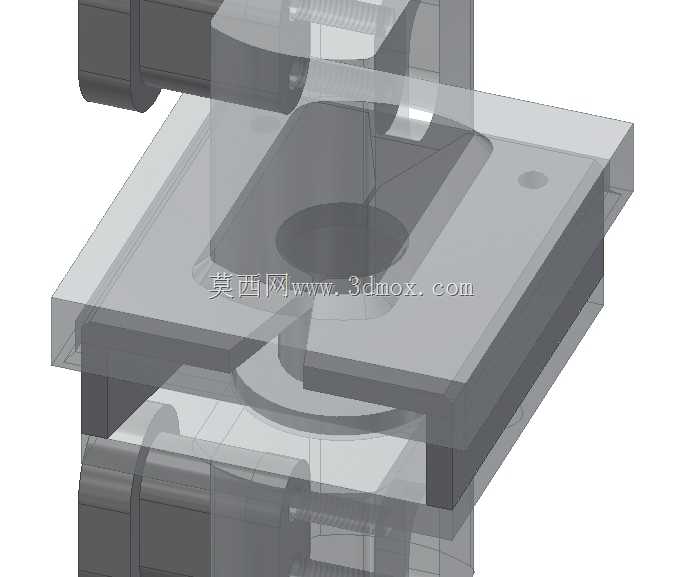
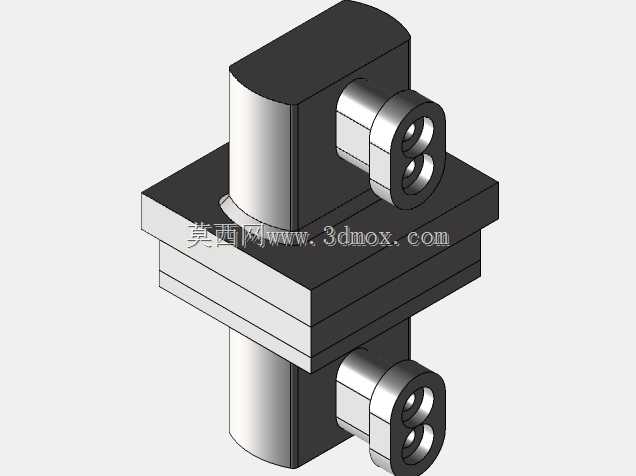
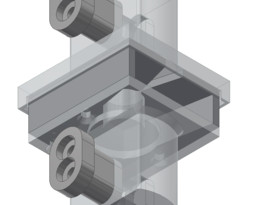
Хвёц»ъЦЖ»№І»НкХыЈ¬ҝЙДЬ»№ҝЙТФҪшТ»ІҪФцЗҝЈ¬ө«ОТЦ»КЗКұјдІ»№»БЛЈә>Ј»Ј©іэБЛГиКцЈ¬ОТ»№ёҪЙПБЛТ»Р©КУЖөәННјЖ¬ЎЈИз№ыДъУРИОәООКМвЈ¬ЗлёжЛЯОТЈ¬ОТҝЙТФФЩҙО·ўІјКУЖөЎЈОЮВЫИзәОЈ¬ОТГЗөДПл·ЁКЗҪ«Т»ёцЙПІҝИЭЖч·ЕЦГФЪБҪёцЗҜРОұЫЦРЈ¬НЁ№эҪ«ҪЕ»¬¶ҜөҪО»АҙҙтҝӘәН№ШұХЗҜРОұЫЈ¬И»әуҪ«Жд·ЕөНТФҪ«ЛщУР¶«Оч№М¶ЁөҪО»ЎЈХвСщҫНІ»РиТӘИОәОИЛІОУлІЩЧчёГ»ъ№№ЎЈХвР©Іҝјю¶јКЗВЭЛЁБ¬ҪУөДЈ¬ОТГ»УРОӘИОәОҪф№МјюҪЁДЈЈ¬ТтҙЛЛьГЗҝЙТФУҰУГУЪПЦУРИЭЖчЈ¬ІўЗТҝЙТФФЪІҝјюҝӘКјДҘЛрКұЗбЛЙёь»»ЎЈОТГ»УР»ъ»бҪшРРИОәОјЖЛгЈ¬ТтҙЛҝЙТФК№УГёьЗбөДІДБПЈ¬ө«ДҝЗ°К№УГМјёЦКұЈ¬ГҝёцҪУН·ЈЁ№«ҪУН·әНДёҪУН·Ј©өДГҝёцҪЗҙуФјОӘ50°хЎЈН¬СщЈ¬ОТПаРЕХвКЗҝЙТФёДҪшөДЎЈұ§ЗёЈ¬ЧоәуТ»·ЦЦУҪшИлЈ¬ЗлЛжТвМбОК
------·ЦёфПЯ----------------------------
- ЙПТ»ЖӘЈәёҪјюјР
- ПВТ»ЖӘЈәјРіЦЖч-К°ИЎ\u0026ПВҪө

ЛөөгКІГҙ°Й
- И«ІҝЖАВЫЈЁ0Ј©

»№Г»УРЖАВЫЈ¬ҝмАҙЗАЙі·ў°ЙЈЎ
- ДЈРНҙуРЎ Јә17.5 MB
- Пы әД Јә5ДӘОчөг
- ПВФШҙОКэ Јә
- °ьә¬ОДјю ЈәSTEP / IGES,STEP / IGES,Other,Other,Rendering,Other