月球定日镜子系统
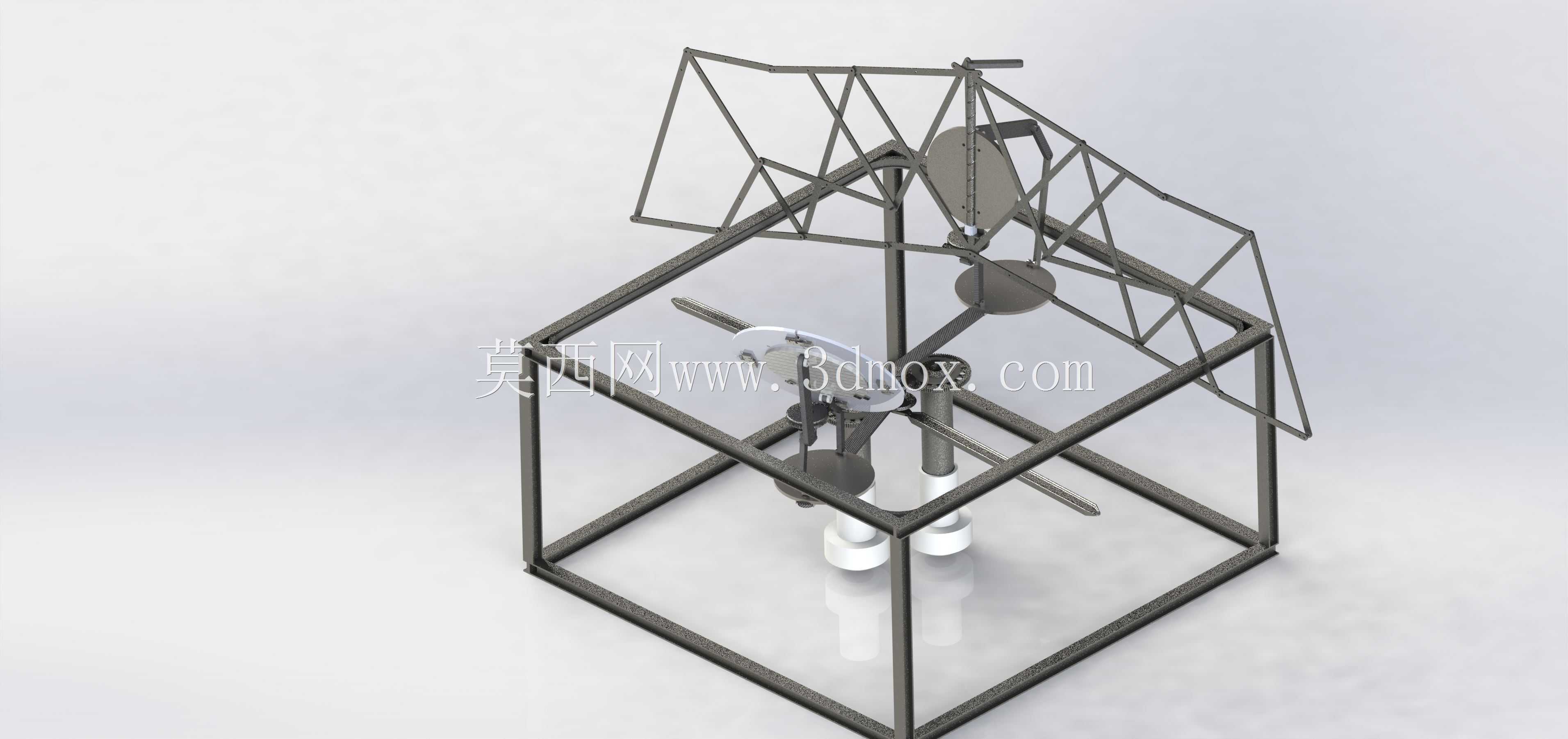
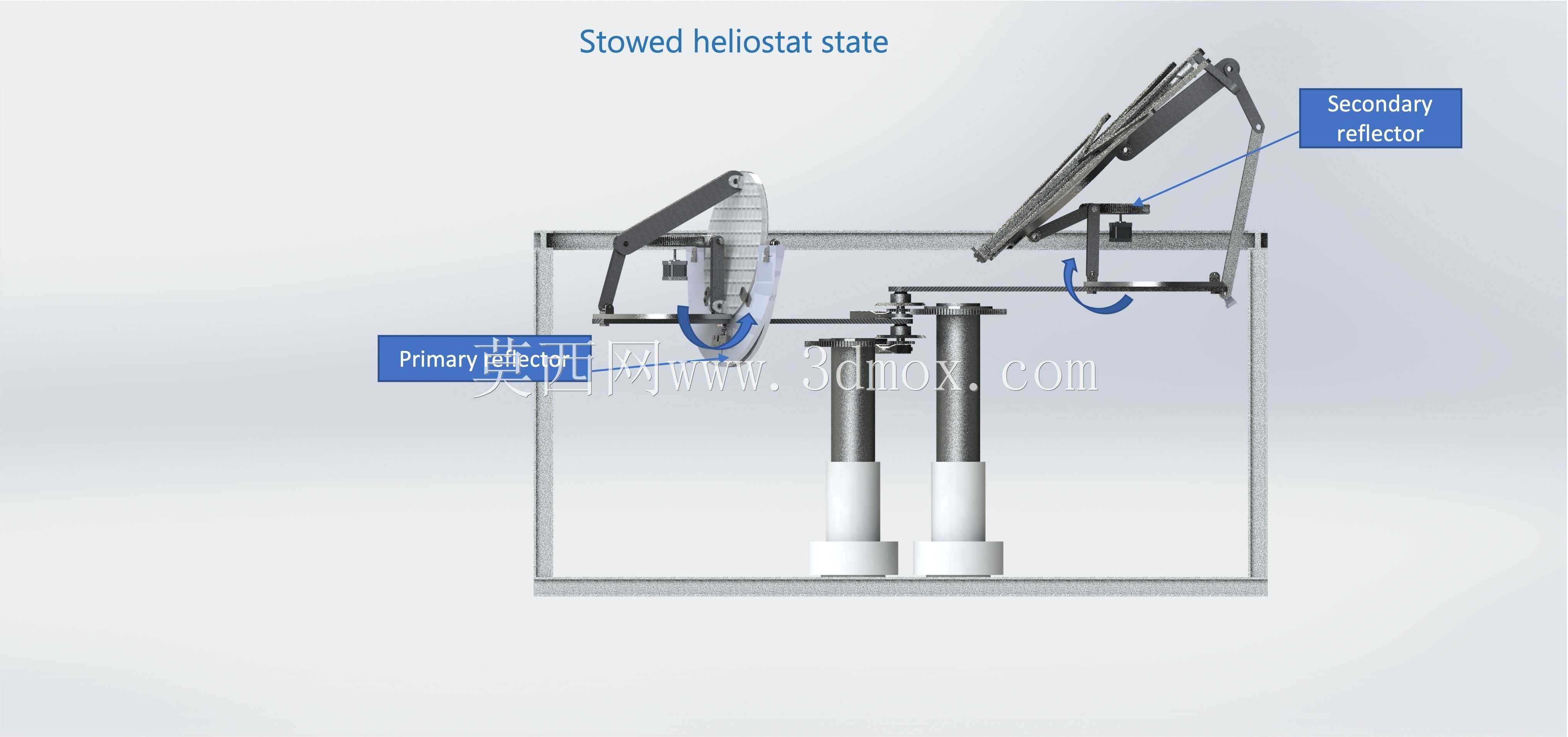
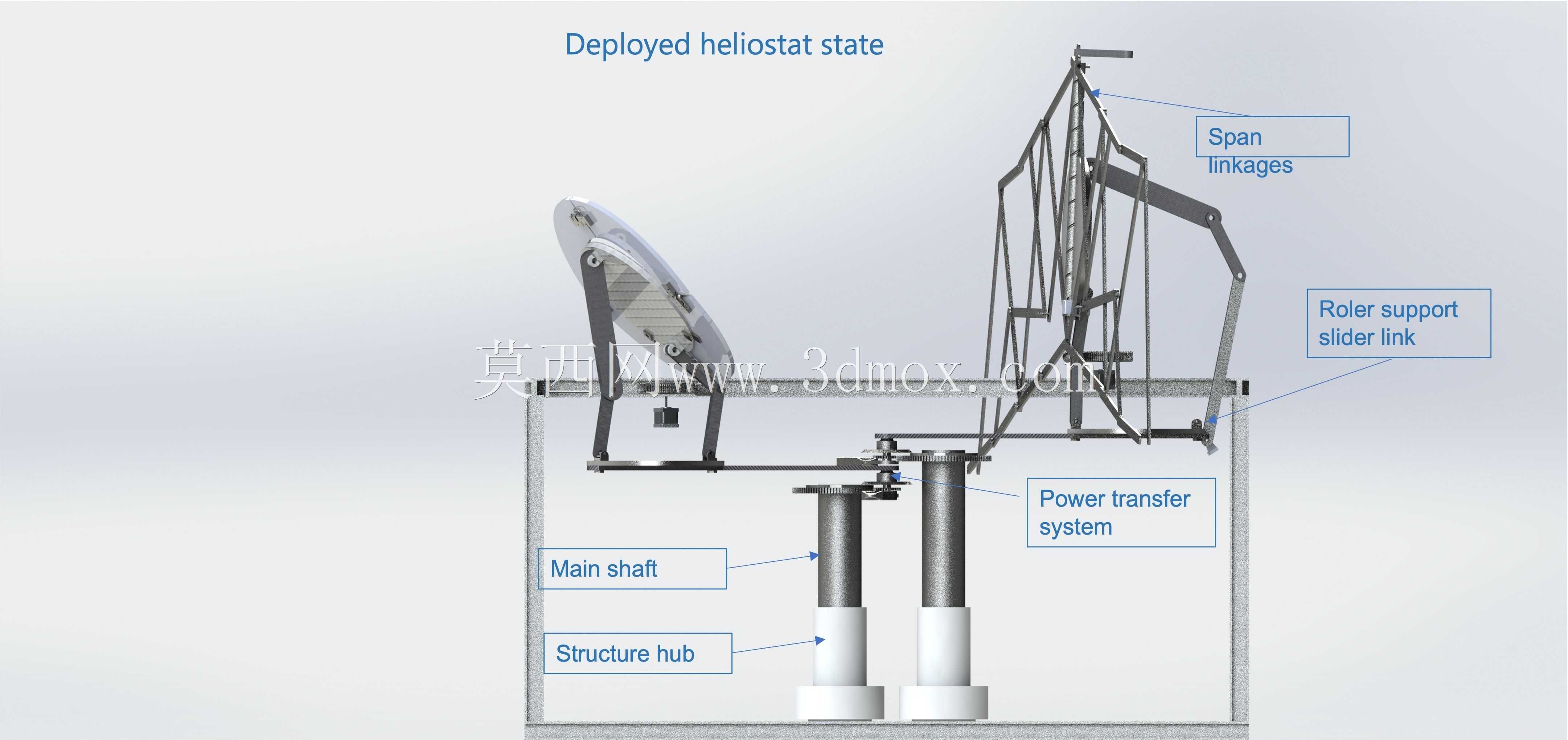














我在此提出一个子系统,该子系统旨在将太阳光反射到陨石坑中,在太阳、定日镜子系统和陨石坑的大多数相对位置。概述本设计装配了两个相对的反射面,它们可以异步移动,以从上述最可能的相对位置反射阳光。定日镜子系统具有两个轴的运动自由度机构。该设计具有闭环运动链,用于实现反射器的第一个旋转度。装配了一个蜗轮和蜗轮系统来旋转机构的曲柄连杆。该系统用于收起或作为锁定机构,以承受动态负载。设计了一个带有延伸臂的旋转机构,用于反射镜的二度移动。我添加了齿轮传动系统的设计模型,用于将动力传递到臂上。主轴通过止推轴承和衬套安装在结构轮毂内。小齿轮使用在小齿轮轮毂上切割的花键将动力传递给臂座。该动力传输系统是在推力球轴承的帮助下组装的,并参考了SKF发布的球轴承模型。在组装的两个反射器中,辅助反射器的用途是将阳光从主反射器重定向到月球车。辅助反射器的可扩展跨距连杆机构延伸至3.8 m。柔性反射板应包裹在连杆的跨度上。螺旋槽切割杆应展开跨度连杆。主反射器是由4块反射板和一个位于中心的太阳能电池板组成的组件。折叠反射器将通过扭力弹簧铰链展开。详细工作机制:转子动力传输至安装在结构轮毂内框架底部的主轴。主轴靠在止推滚柱轴承上。轴倾斜通过安装在轮毂中的衬套进行控制。驱动齿轮通过法兰安装在主轴上。驱动齿轮与小齿轮啮合,即与反射器组件的旋转轴同心。小齿轮有一个加工花键的轮毂。这些花键驱动反射器组件底座组件。小齿轮安装在止推轴承上。推力轴承安装在固定板上,固定板由连接到机架侧面的臂支撑。反射器总成的基础部件由安装在小齿轮顶部的止推轴承支撑。然后,小齿轮驱动反射器总成底座部件,使反射器与太阳成适当角度。主反射器和辅助反射器应在该机构的帮助下旋转。反射镜组件安装在旋转组件臂的末端。反射镜组件是一个闭环四杆运动链。机构的曲柄连杆由蜗轮和蜗轮系统转动。蜗轮系统由安装在底板顶部的电机驱动。需要单独的输入来驱动该电机。该机构的输出连杆是一块安装有反射镜的板。对于主反射器,装配可折叠板。借助扭转弹簧铰链控制板材的折叠。然后,输出连杆向上移动并以曲柄连杆控制的特定角度旋转。由于外部负载,输出连杆无法驱动曲柄连杆,因为蜗轮不会驱动蜗轮,并且应保持静止。对于辅助反射器,在输出连杆上安装跨度连杆组件。跨度连杆通过向外滑动一个连杆来展开。这种滑动运动是在螺旋槽切割杆的帮助下进行的。连杆在安装在输出连杆末端的电机的帮助下旋转。销沿着杆中凹槽的螺旋路径移动,因此连杆向外滑动以展开跨度机构。跨度机构延伸至3.8 m。柔性反射膜应连接至跨度连杆。运动链的固定连杆通过滚轮支撑滑块机构安装在子系统的框架上,该机构将允许反射器在第二轴上旋转。子系统在打包和部署状态下的尺寸显示在随此模型上载的图纸的两幅图像中。尺寸单位为毫米。质量属性子系统1配置的质量属性:默认坐标系:-默认--*包括一个或多个隐藏零部件/实体的质量属性。质量=474.07千克体积=3865.34立方英寸表面面积=11.86平方米质量中心:(米)X=0.58Y=0.55Z=1.20惯性主轴和主惯性矩(千克*平方米),取质量中心。Ix=(0.23,0.04,0.97)Px=134.44 Iy=(0.97,-0.03,-0.23)Py=141.56 Iz=(0.01,1.00,-0.05)Pz=176.65惯性矩:(千克*平方米)以质量中心为基准,与输出坐标系对齐。Lxx=141.20Lxy=-0.45Lxz=1.61Lyx=-0.45Lyy=176.55Lyz=2.00Lzx=1.61Lzy=2.00Lzz=134.91惯性矩:(千克*平方米)在输出坐标系下获取。Ixx=973.46Ixy=150.17Ixz=330.74Iyx=150.17Iyy=1022.12Iyz=316.92Izx=330.74Izy=316.92Izz=436.45


- 模型大小 :96.84 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOL