斯卡拉4D.O.F
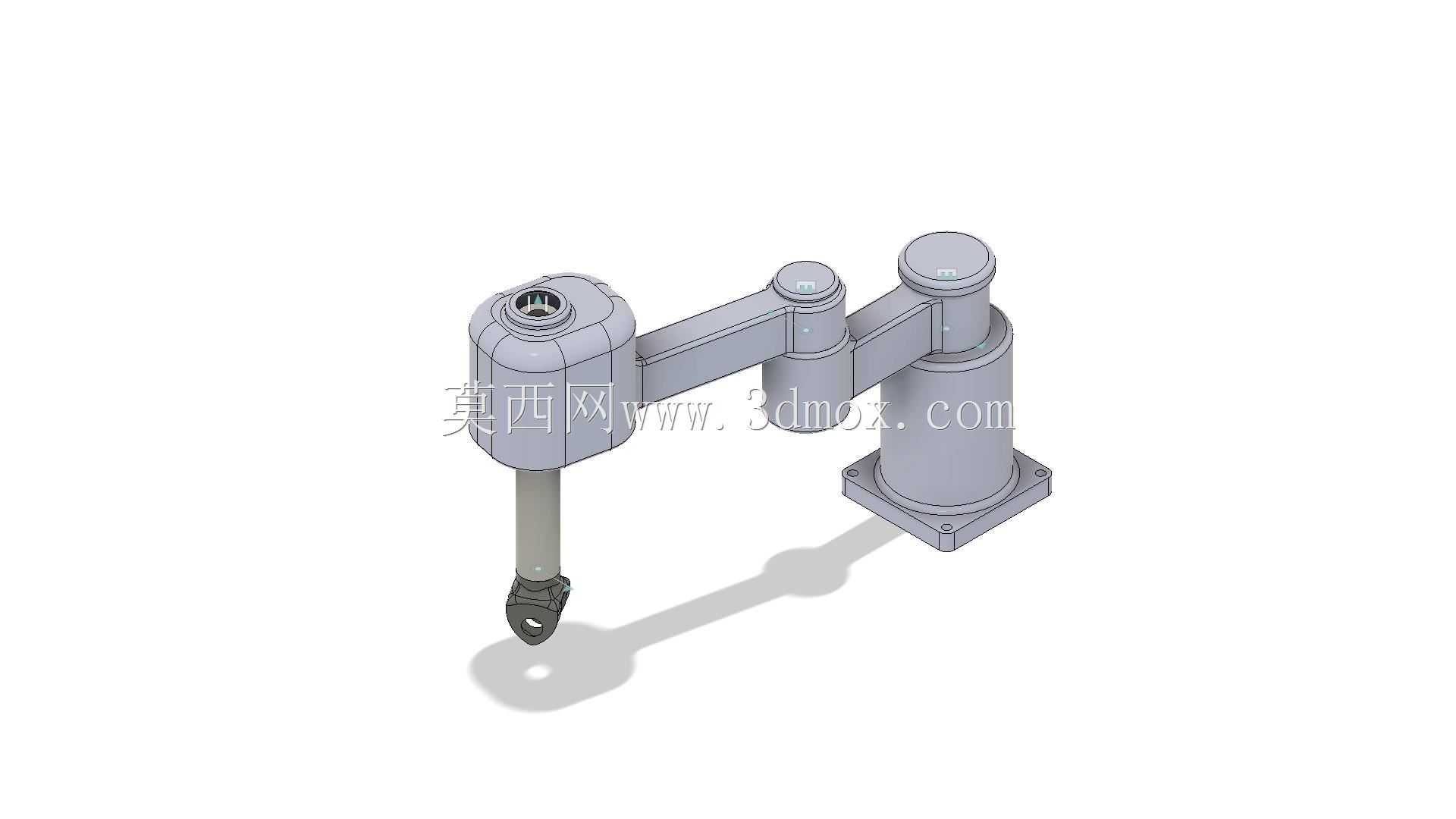
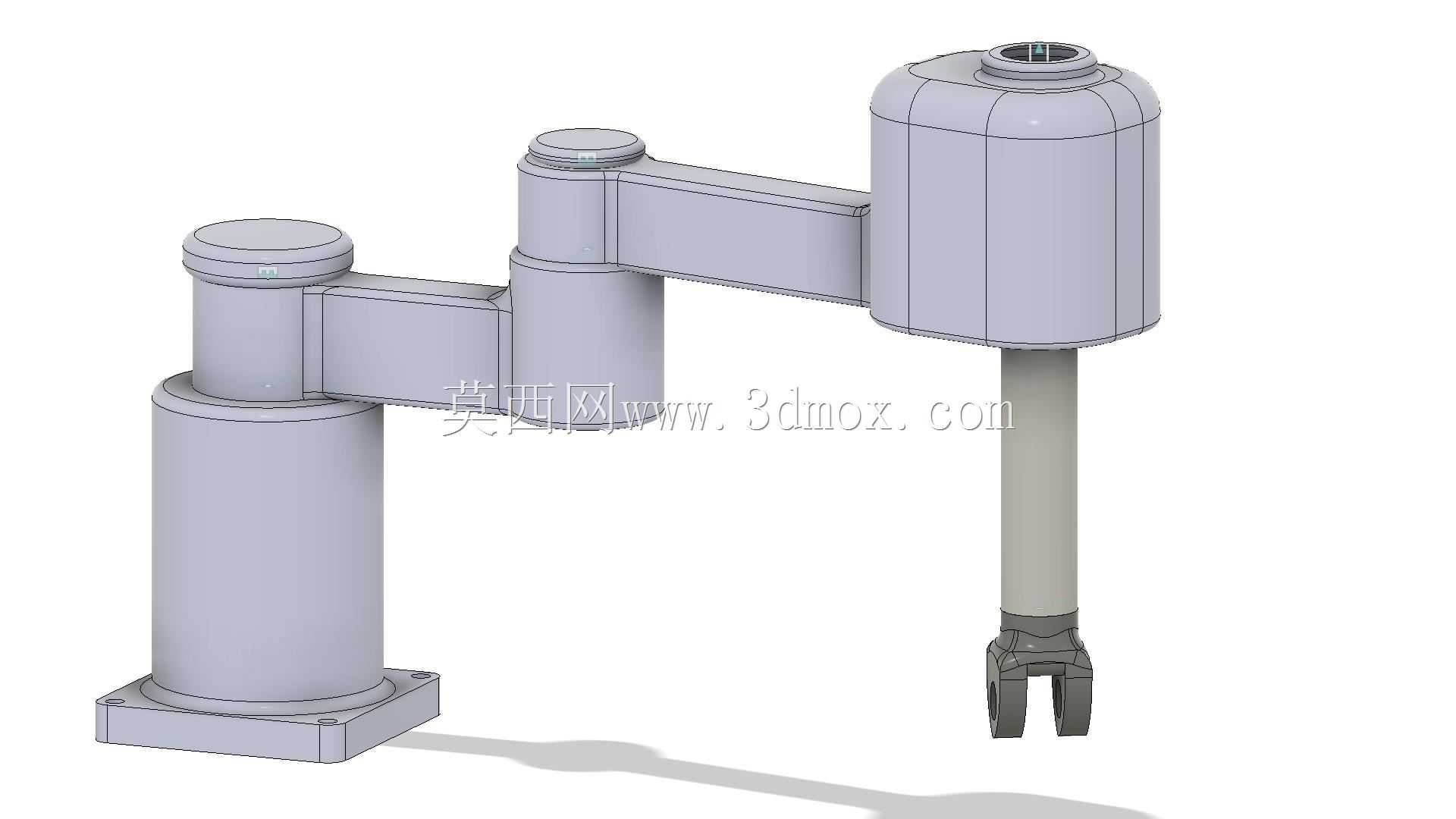





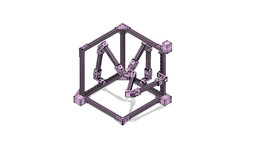
SCARA机器人是小型机器人装配应用的一种流行选择。SCARA是选择性柔顺关节机器人手臂的首字母缩写,意味着它在X-Y轴上柔顺,在Z轴上刚性。SCARA配置独特,设计用于处理各种物料搬运操作。SCARA的结构由两个臂组成,两个臂连接在底座上,一个臂和两个臂的交叉处。两个独立的电机在关节J1和J2处使用反向运动学和插值来控制SCARA的X-Y运动。臂2末端的最终X-Y位置是J1角、J2角、臂1长度和臂2长度的系数
标签:
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :3.25 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Autodesk Inventor,Rendering,Autodesk Inventor