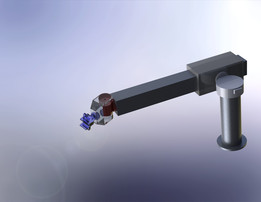
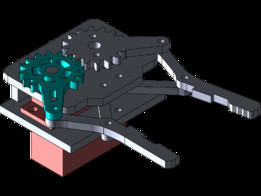
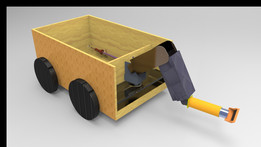
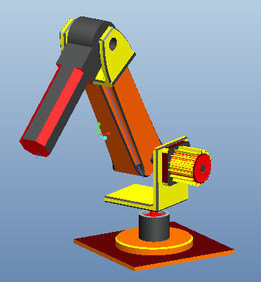
机械手
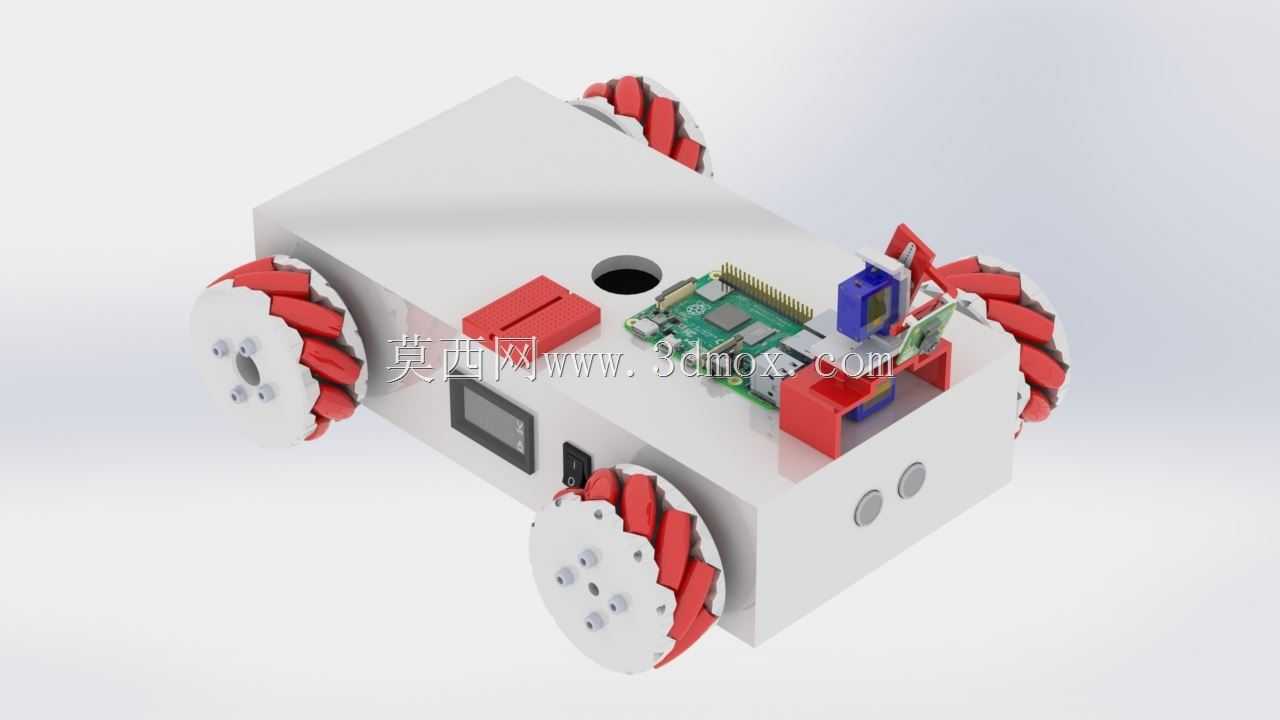
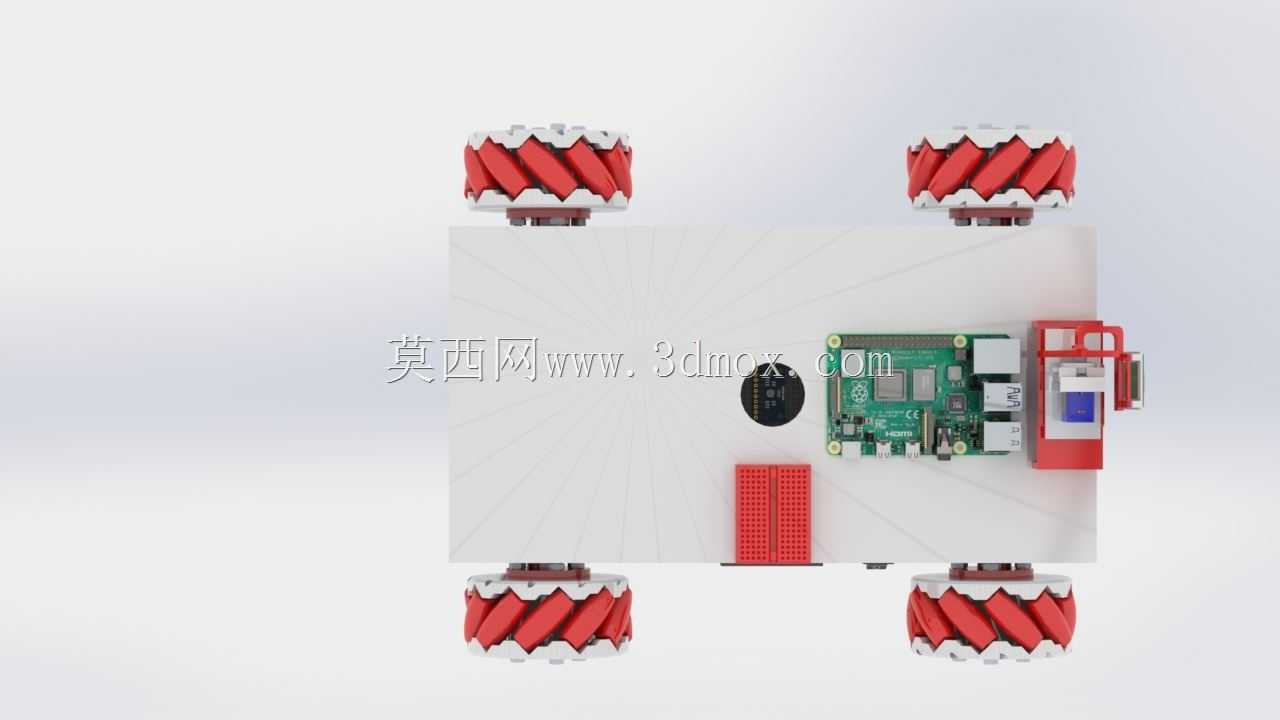
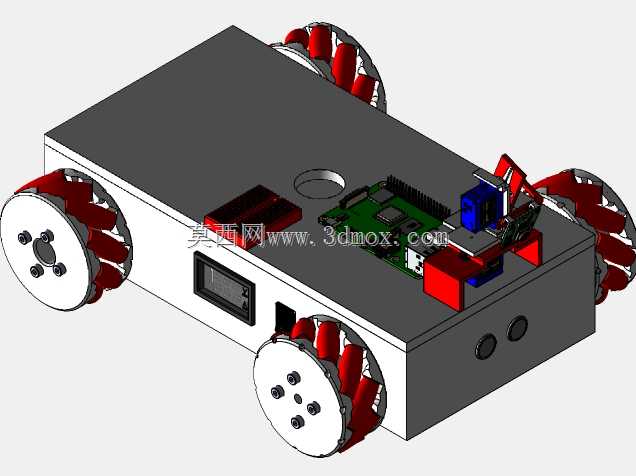

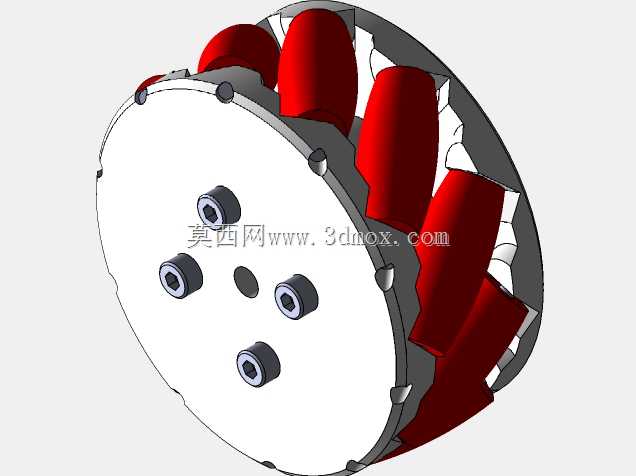



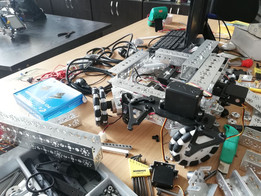
我的控制实验室项目是一个带有raspberry pi 4和pi摄像头的Mecanum机器人,该机器人使用OpenCV库识别车道线并保持在车道线之间,该机器人也可以在没有计算机视觉反馈的情况下单独控制原始Mecanum车轮由“如何机电一体化”创建我将它们编辑为与SolidWorks一起使用,并添加了raspberry pi和带有平移-倾斜机构的pi摄像头以及我使用的其他部件。我将在完成GitHub后立即上载代码和文档:https://github.com/AymanBakleh/Mecanum
标签:


- 模型大小 :122.36 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,STEP / IGES,Rendering,STEP / IGES,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,S