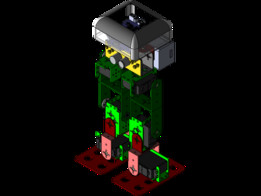
带超声波传感器的Arduino双足机器人(仿人机器人)

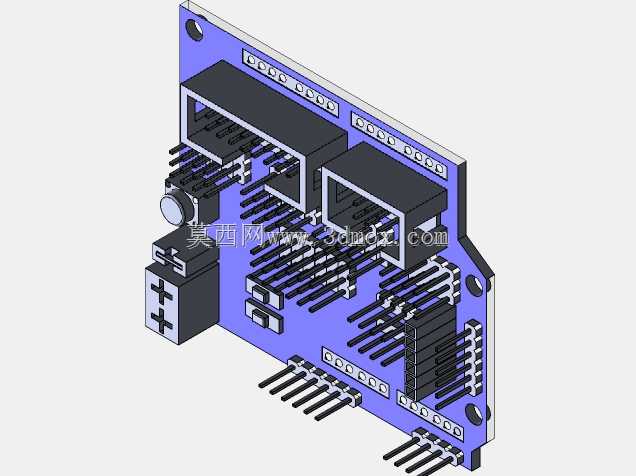
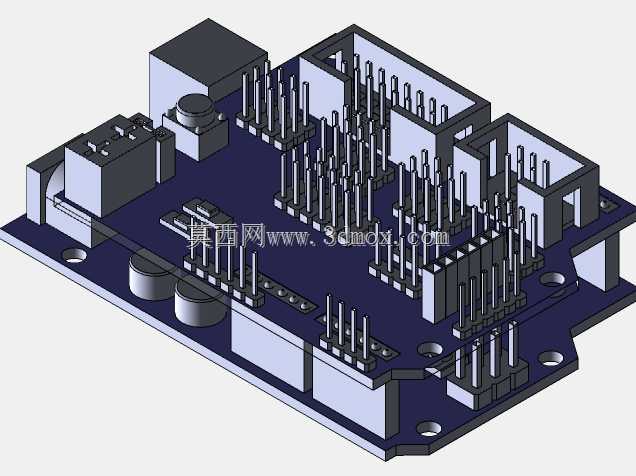






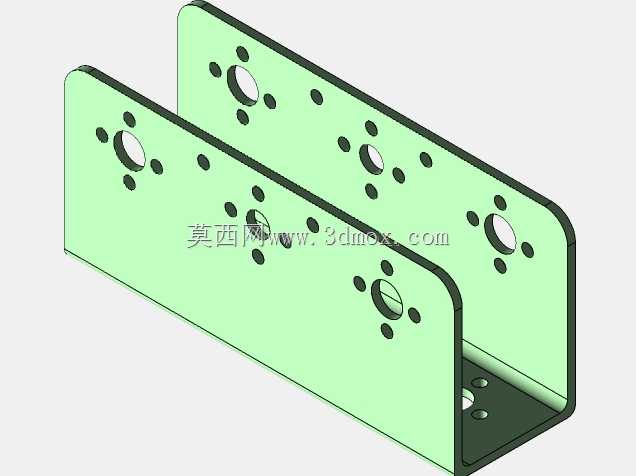
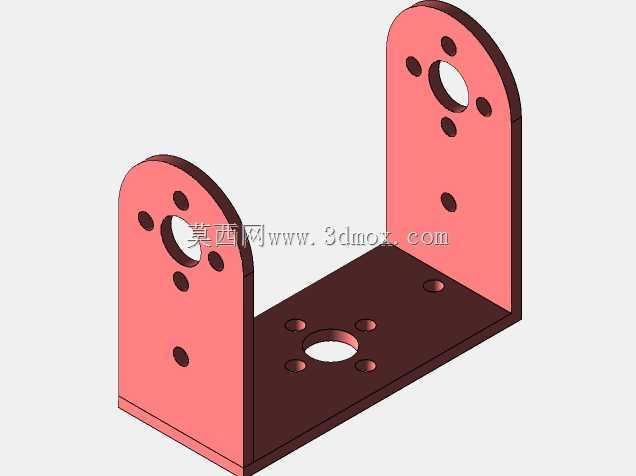



该项目旨在创建一个自动两足机器人,该机器人带有6个伺服电机(MG996R),可作为人类臀部、膝盖和脚踝的起点。由Arduino Uno R3控制,带有Arduino传感器屏蔽。除此之外,超声波传感器还用于识别障碍物。基于障碍物识别,可以改变biped的路径,以避开障碍物内的碰撞。您可以在GitHub中获得代码:https://github.com/alisodal1997/If 您想观看此项目的视频:https://youtu.be/XjksPBNdf18
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :6.41 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS