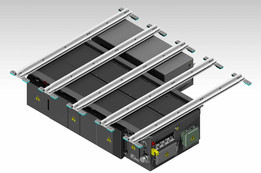
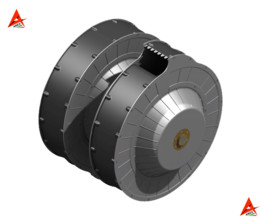
RASSOR铲斗滚筒设计-2:内部导流板的改进
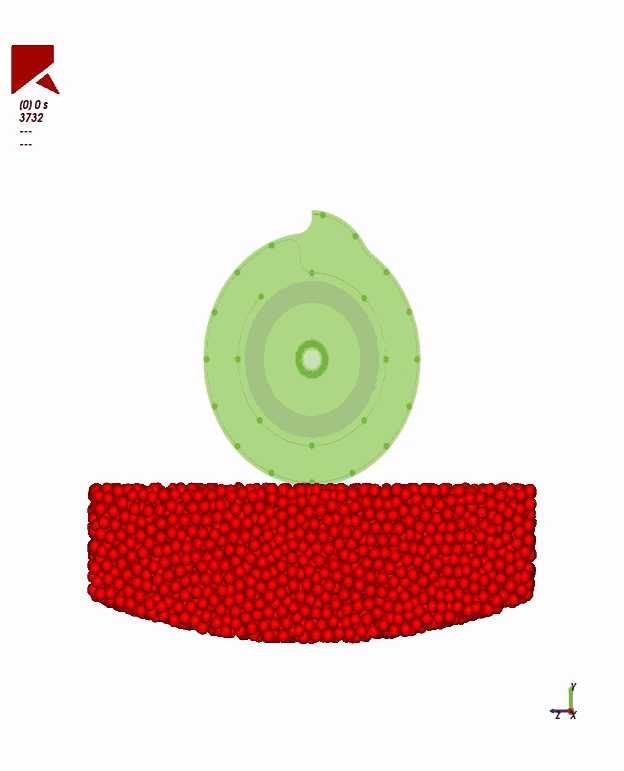

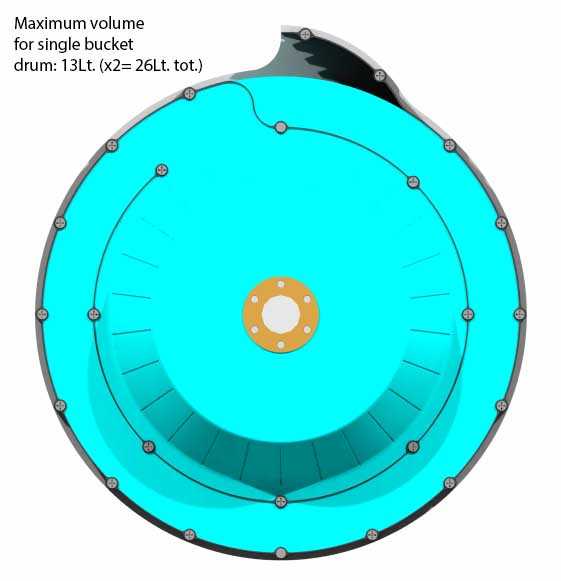
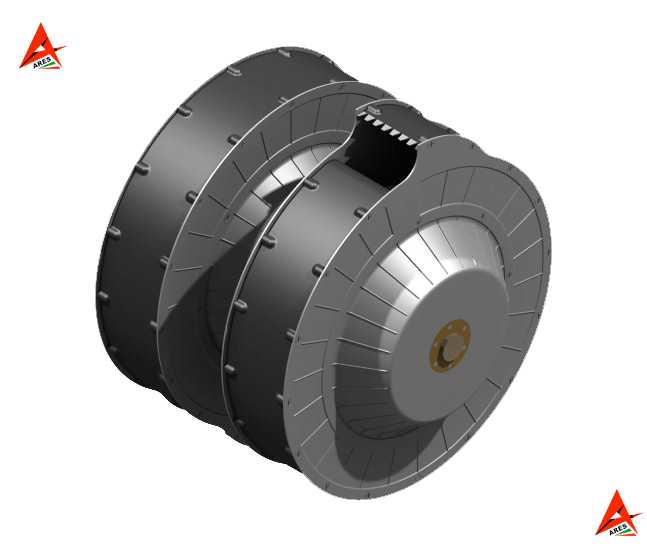
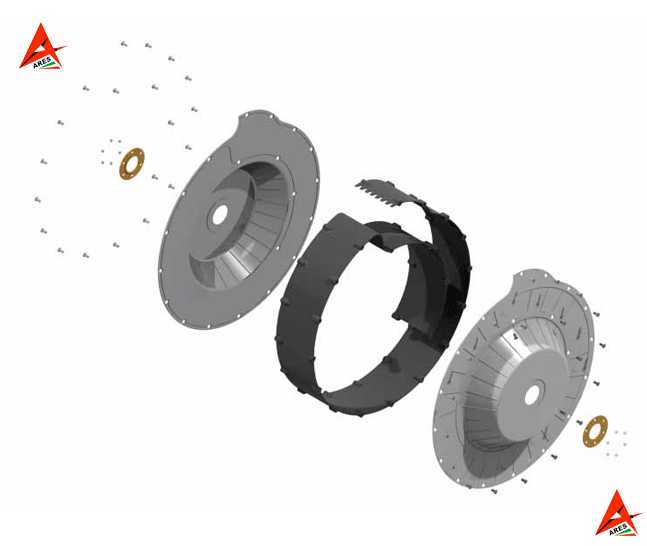
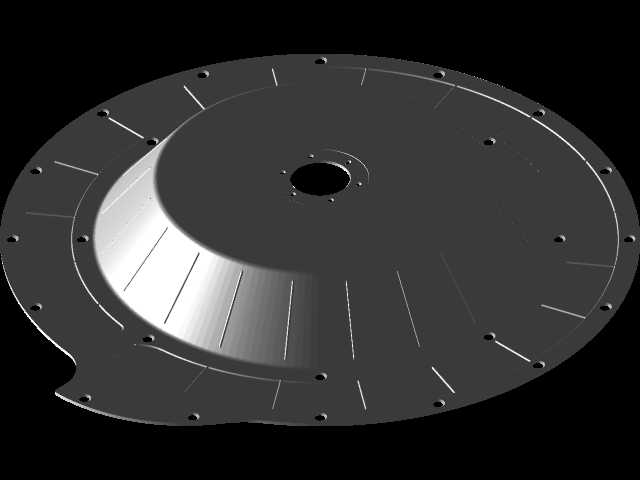
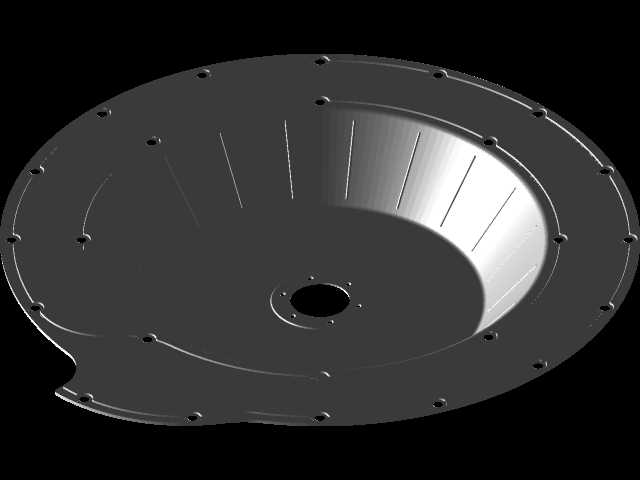
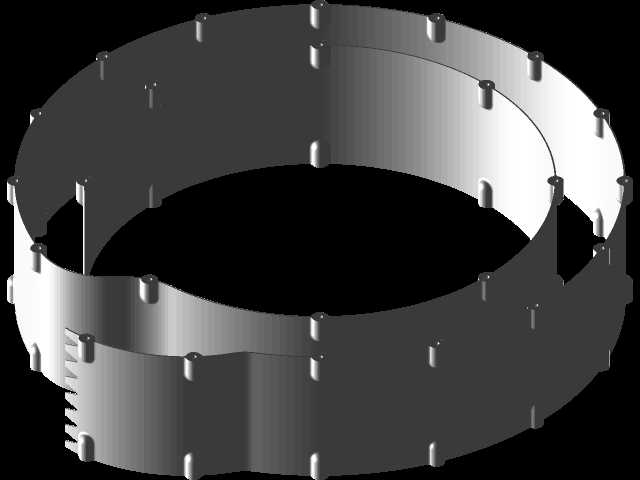
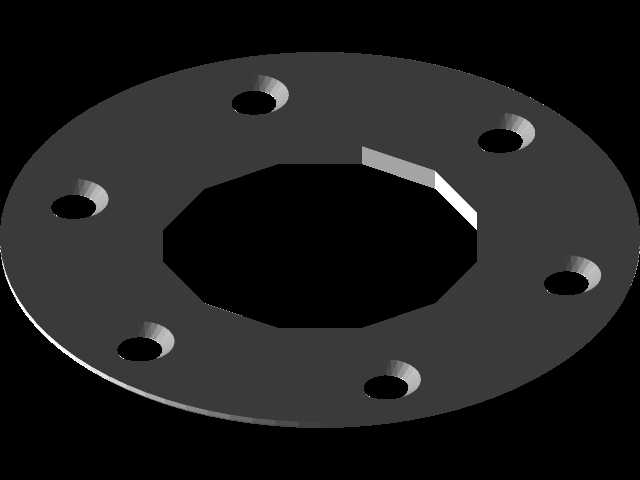
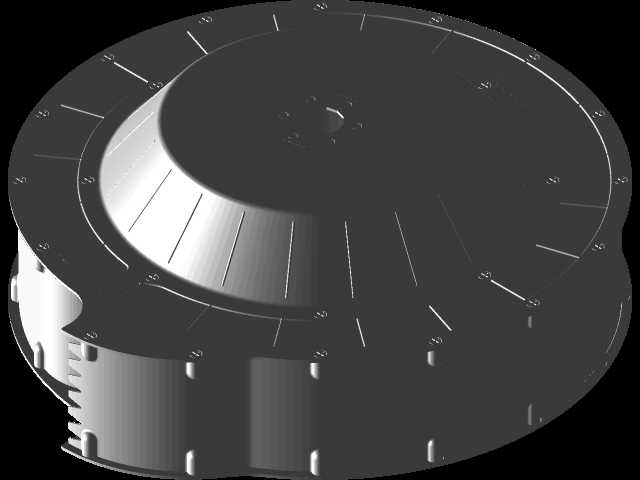
RASSOR铲斗卷筒设计-2:改进内部导流板该系统有两个单独的铲斗卷筒,以确保即使其中一个损坏,挖掘工作仍能继续进行;由于铲斗滚筒的所有零件均采用MS螺钉固定(或者,也可以不使用螺钉将其焊接在一起),因此可以快速轻松地更换所有损坏的零件。每个铲斗滚筒的铲斗宽90mm,其内部有一个挡板,根据其旋转方向存储或推出表土;在将表土运输至基本储存点的整个过程中,铲斗滚筒无需继续旋转以将表土保留在内部。这会降低电池消耗。我将传动轴更换为一个十角形截面(刻有30mm直径)的传动轴,以便在不使用适配器的情况下将旋转传递到铲斗滚筒,以节省系统重量,并且我还可以将铲斗滚筒定向,其中有30°台阶(可用于某些任务);此外,它们还可以辅助机器人的牵引。所选材料为Ti-6Al-4V 5级钛合金,所有部件均为3D打印设计,项目技术数据如下所示。技术特征:在任何给定时间使用的勺子的最大总宽度:90mm单桶桶重量:2,5kg(x2=5kg tot.)最大铲斗滚筒直径:450mm单个铲斗滚筒的最大长度:180mm(x2=360mm总计)。单个铲斗滚筒的最大容积:13Lt。(x2=26升总重量)单铲斗卷筒的最小装载量:9.5升。(x2=19Lt.tot.)填充率:估计73%通过设置重力吸引1625 m/s2和铲斗滚筒旋转20 rpm的模拟,使用Rocky DEM执行运动学运动。填充过程大约需要42秒(13轮)。请注意:即使你看到一个正确的卸载阶段的系统,表土停止在一个fantom结构,我以前没有注意到。很抱歉,我正在再次进行模拟,但它将在20小时内准备好。很抱歉,这是我第一次使用Rocky DEM程序。谢谢


- 模型大小 :96.8 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Rendering,STL,STL,STL,STL,Rendering