我在学校做的事情4(装配设计和分析)
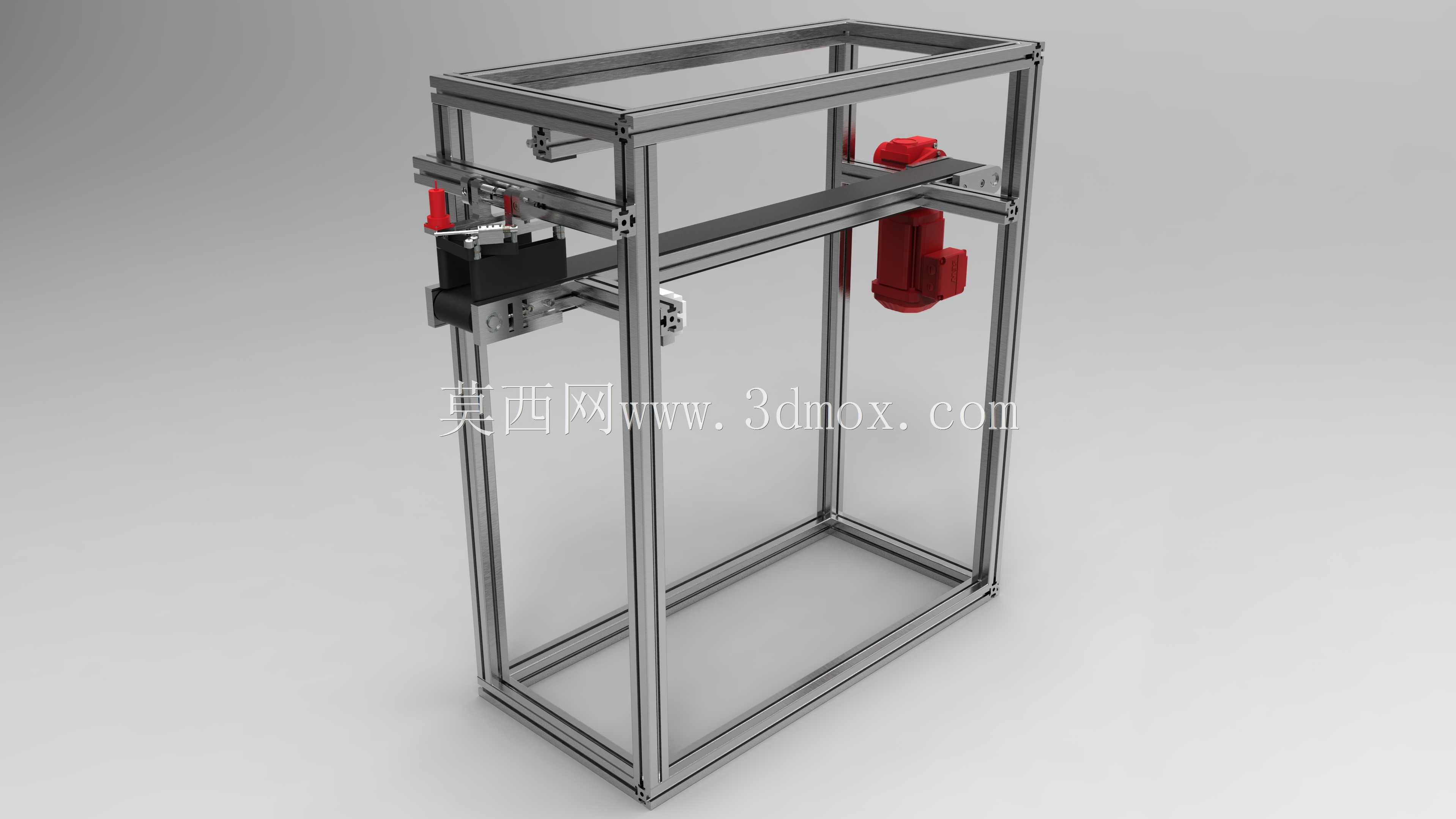


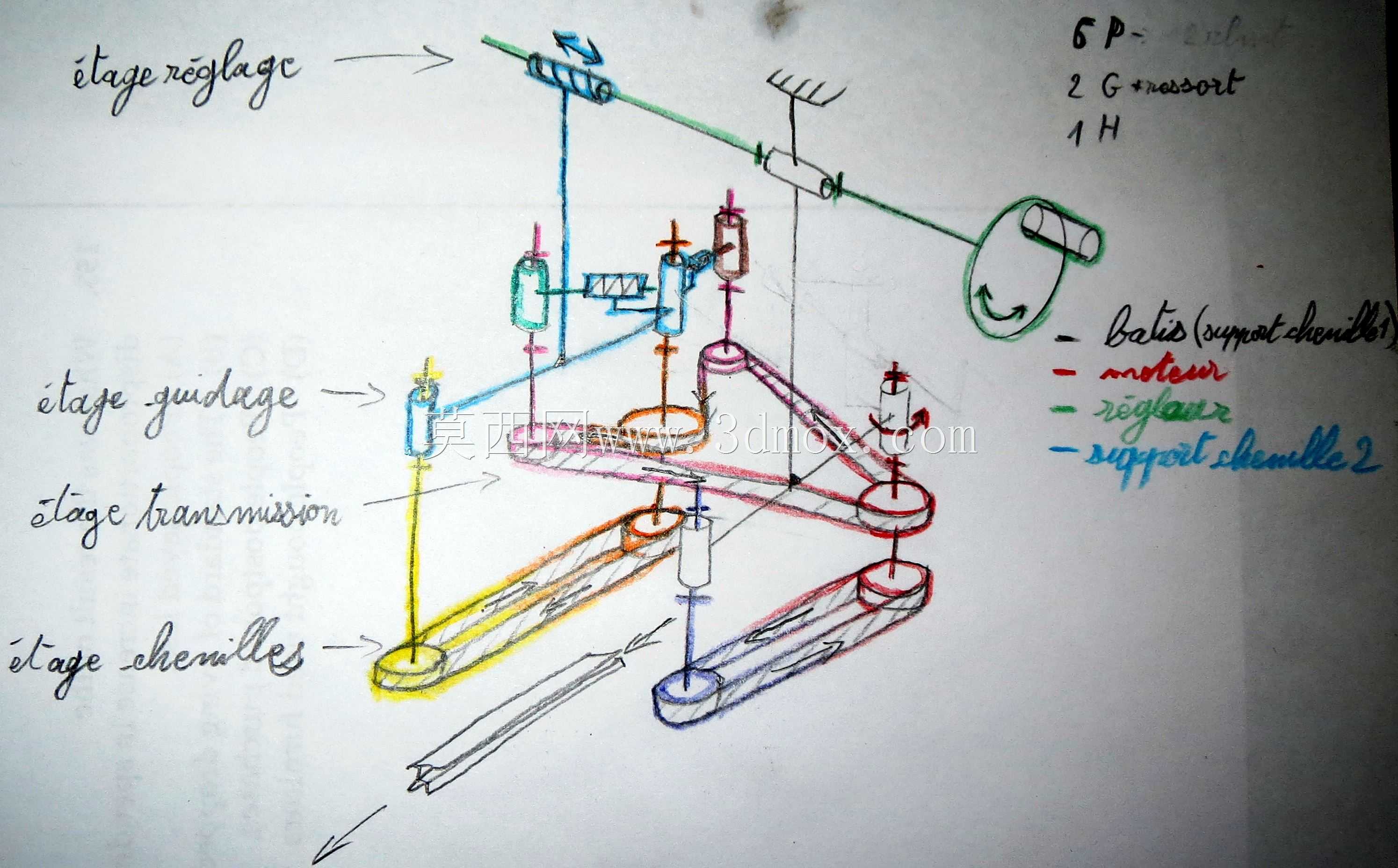
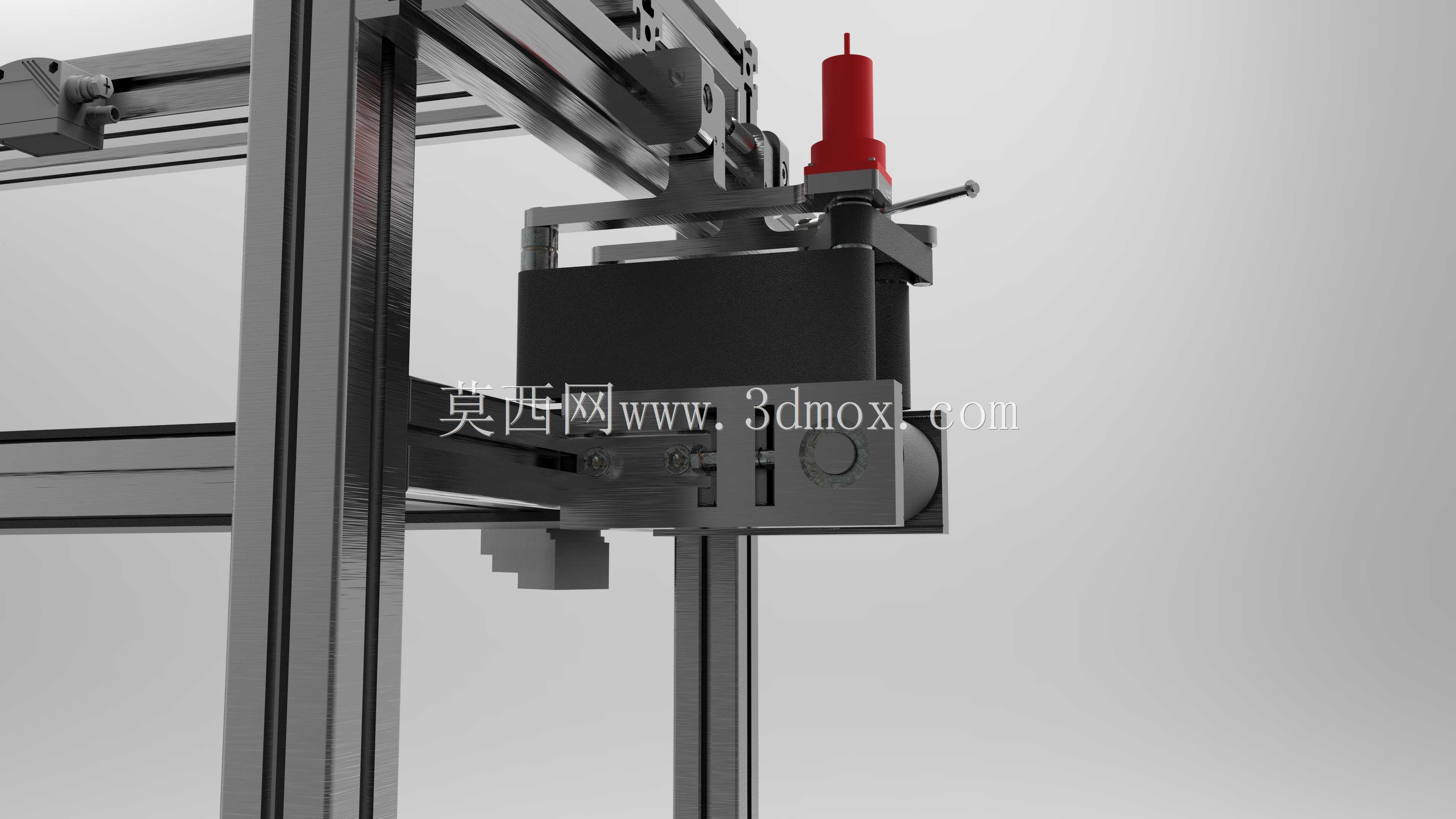
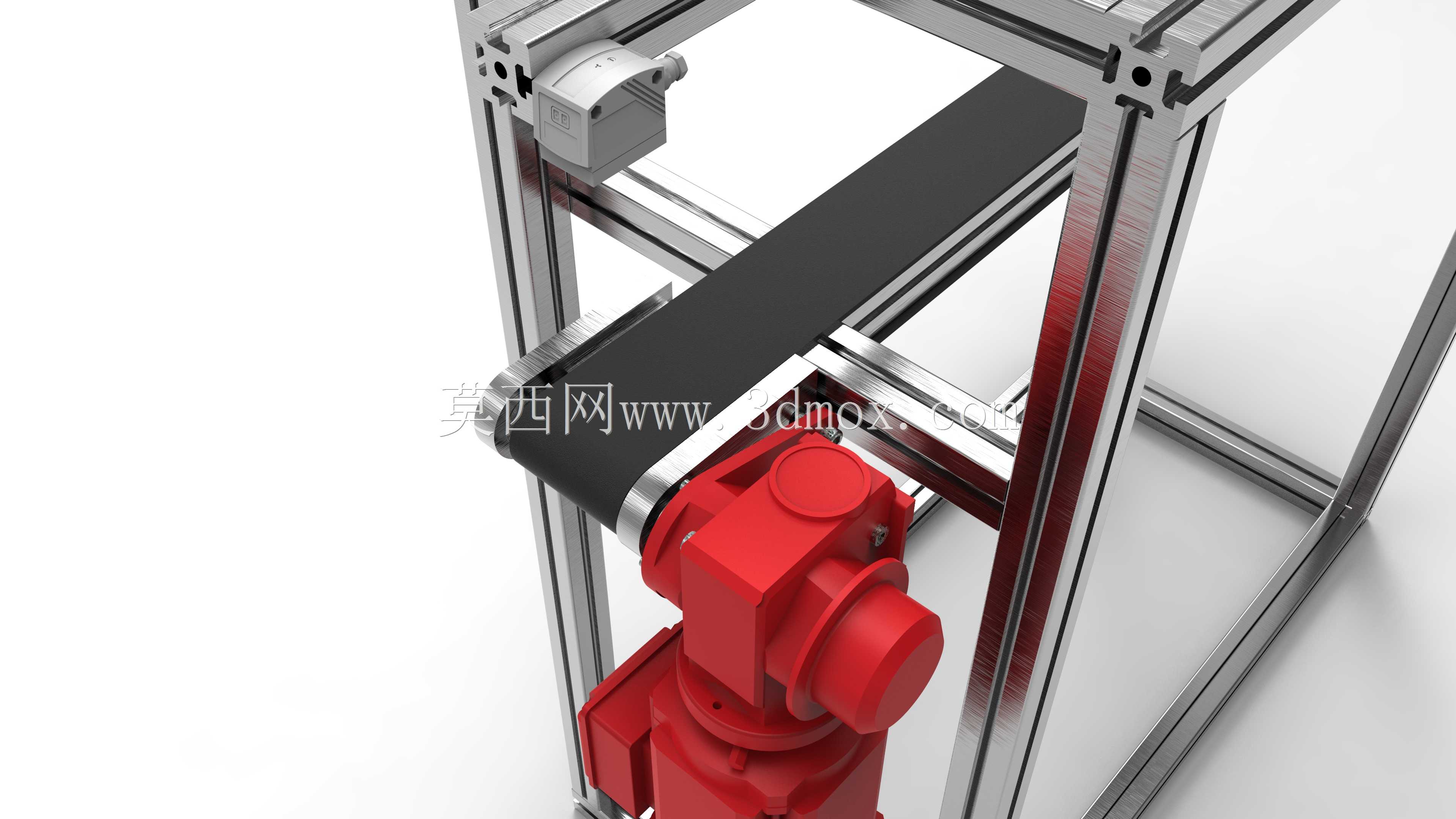


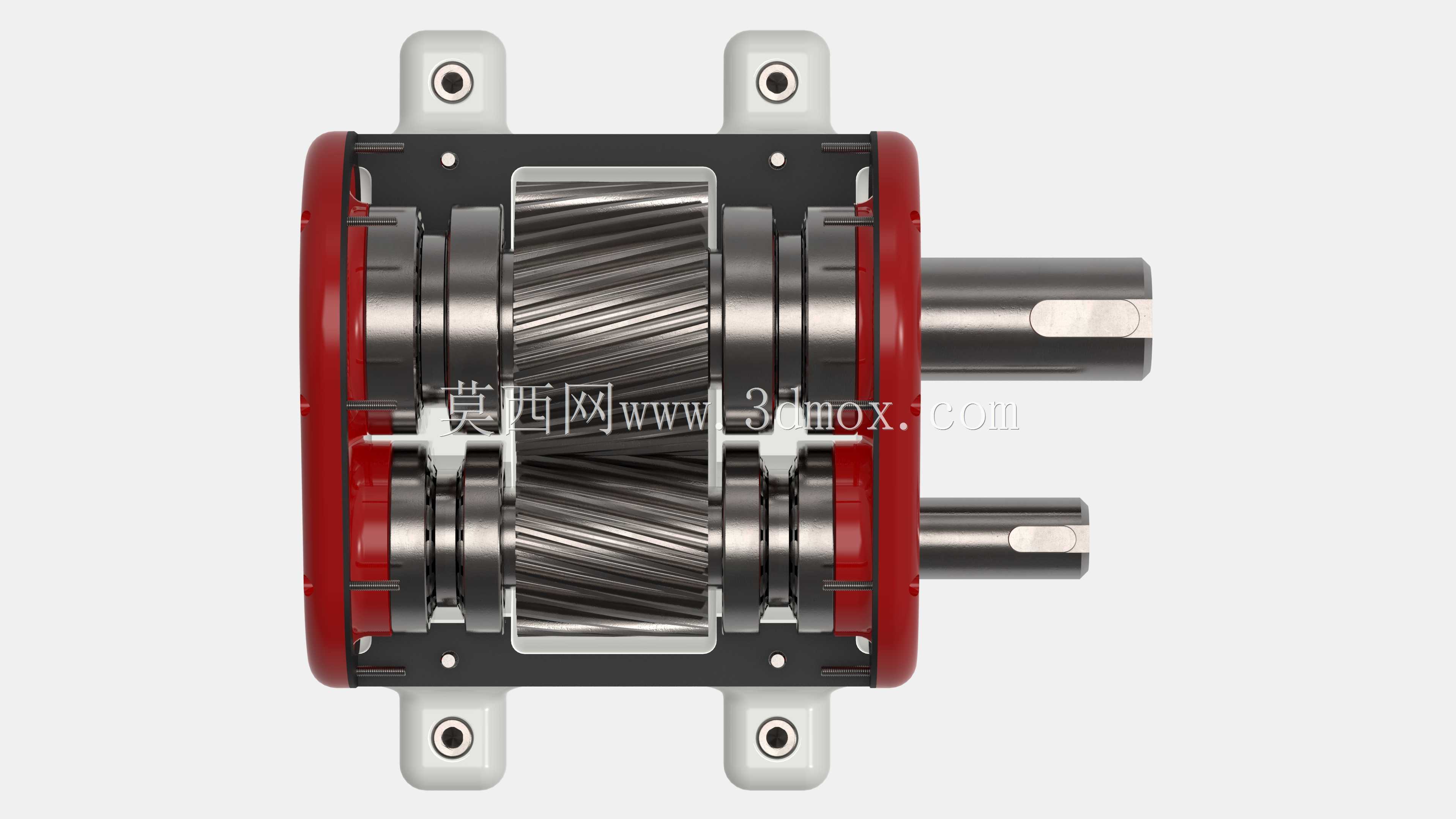


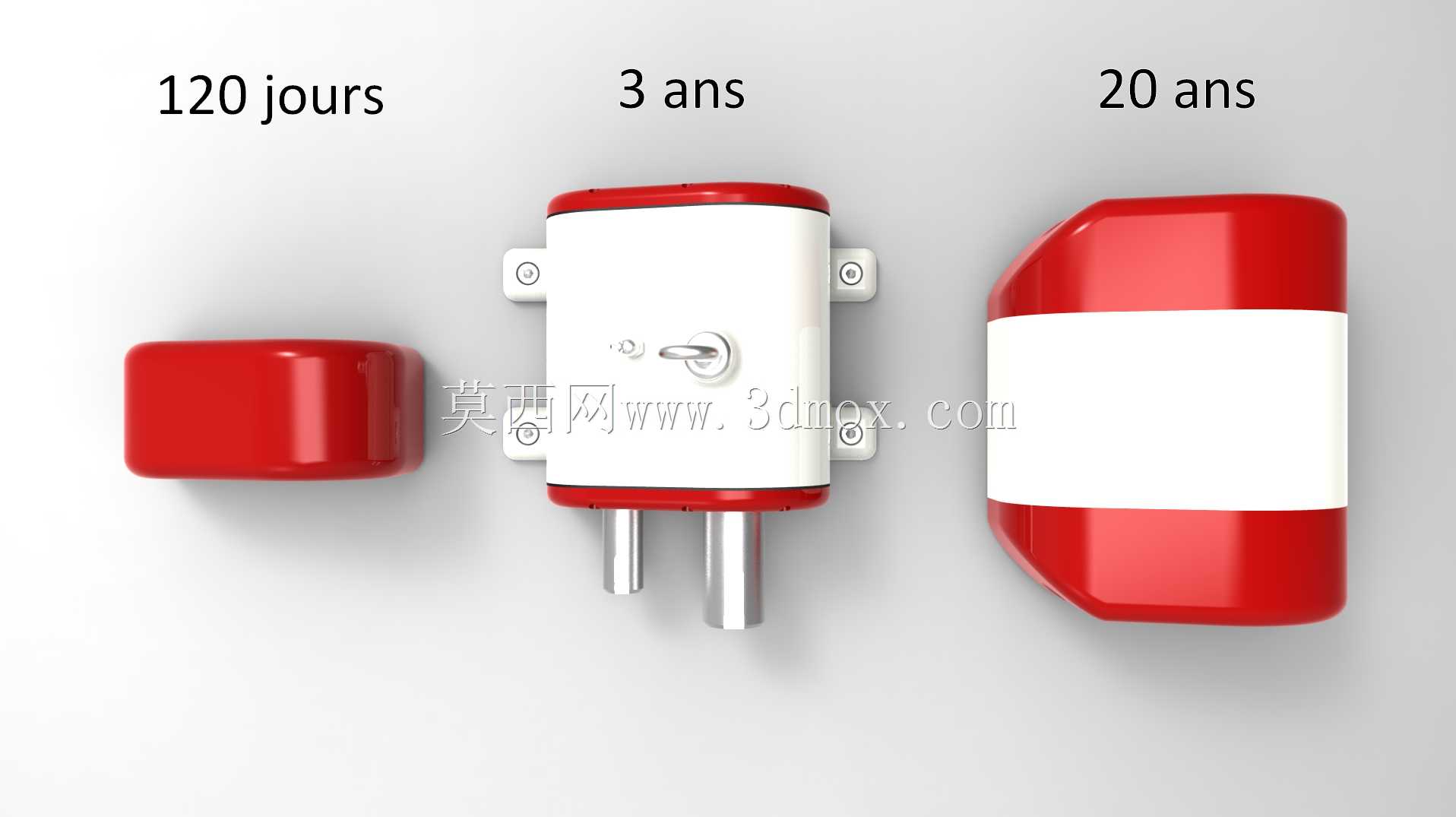

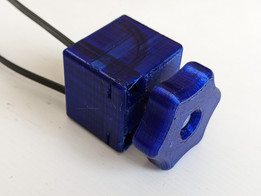
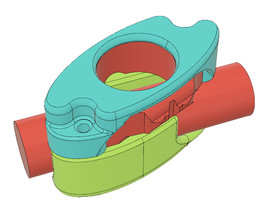
GMP的最后三个月这段时间分为两类,一类是根据规范进行的纯设计,另一类是已经存在的机理研究,主要使用solidworks模拟和meca3Dstress、energy和Ecology模拟,以找到改进产品的解决方案。有很多问题需要讨论,因此我知道没有人会阅读所有内容,但是如果你对其中一件作品感兴趣,所有的东西都按时间顺序列在下面,包括我们做这件事的时间,我们做了什么,以及我最终得到了什么(很抱歉所有的.zip文件,我很难在grabcad中一次上传所有的东西)设计:1坦克履带张紧轮轴承导向(4小时个人测试):因为这是一项测试,我没有原始文档,但我试图根据在线发现的主题图片重新制作模型我们必须将轴承和轴连接到caterpillar张紧轮,同时使其防尘且易于润滑左侧轴承仅固定在其外圈上,而右侧轴承完全固定,使用一个小螺纹片和一个螺纹零件,润滑油通过轴上的钻孔,但更不用说2离心泵轴轴承导向(4h):再一次,仅在带有轴承的孔中导向轴,必须防尘,并且只能在给定的零件上钻孔,而不存在完整的重型减速器(16h+一个月的空闲时间):更有趣的是,这是一个从零开始设计的完整组件,我说的是重型减速器,因为它必须承受相当大的应力,而不会减少太多(实际上是一个减少的轴承,它必须承受巨大的负载)但它必须有多大的负荷还不清楚,我们必须使用圆锥滚子轴承和油滴(最高端的润滑)并且有负荷值,但没有寿命值…所以我用不同的轴承布局做了3个选择,一个可以在120天的连续负荷下正常工作,一个可以使用3年,另一个可以使用20年(图中,120天1档齿轮厚度错误,因此太薄)我第一次使用的是3年的,但它使用了双轴承,显然我们不能这样做,所以我从120天开始重新开始,所以我们首先必须定义齿轮,让一台30马力的电机以1500转/分的速度运行,减速为0.7,有些是固定的,有些是经过计算的,但最后我们得到了斜齿轮,一个26吨的ooth,另一个具有37,2,5mm的模量,70mm厚,两个轴之间为82mm(非常紧密,适合大型轴承)然后定义从2吨轴向和1.5吨径向载荷到输入和5吨轴向和2.5吨径向载荷到输出的轴承,即62x25和90x32轴承,然后围绕所有轴承,制作一个壁厚足够、表面尽可能少的外壳,并将所有用于润滑、提升和固定的附件放置在最后,我认为它看起来很酷,我不知道它是否有用,但至少它非常…在实时渲染中可见:https://sketchfab.com/models/468b0c584d94456bad4376d43eee7cca4 橡胶型材切割控制专用机(16小时+一个月的空闲时间):我们与一位专门从事机器设计的人员所做的最好的工作这台机器的目标是检查从上一台机器上切下的橡胶型材的长度,以及从输送机上切下的橡胶型材的长度,并检查切割形状,以便我们必须在比上一台输送机更快的输送机上方放置4个摄像头(分离型材并能够检查其端部)因此,我们还必须为这台机器的输送机供电,并找到一种方法拉动型材以达到其速度,但型材可以有不同的宽度,从15毫米到70毫米,长度从500毫米到1200毫米。首先,我考虑了相对于输送机的摄像头的放置位置,以便对焦,并且在帧中有所有可能的长度(如果取消隐藏部件的第一个零件,则可以看到设计驱动草图)然后选择电机为输送机和辊子固定+皮带张紧系统供电,最好的部分是:直拉不同尺寸的型材+我要求自己只使用1个低功率电机。因此,我们的想法是在型材的每侧各有2条皮带拉动,2条皮带需要以相同的速度转动,但方向相反本可以使用一个齿轮来改变旋转,然后使用另一个带张力轮的皮带将运动转移到移动的皮带上,但这需要相当大的齿轮,并且没有太多的空间来阻挡摄影机的视线,所以我发现可以通过使用皮带的内侧和外侧来反转运动使用2个张紧轮使传动带绕着移动的牵引带弯曲并调整宽度,我使用了一个带有2条相反螺纹的轴,因此当它转动时,2条牵引带对称移动,结果如下:https://vid.me/M2u2Then 我们必须用铝型材把所有东西连接在一起,并制作一份零件清单(术语)分析:1个收费亭大门开启机制(一周的空闲时间):这里没有什么可以做的,只是在meca3D上练习,看看这个插件能给我们提供什么信息。我还是把它上传到这里,因为它是一个很酷的机制,比在一个平滑的开始和停止中转换一个完整的旋转,一个方向旋转四分之一,然后返回2个带式输送机电机尺寸标注(一周内4小时以上的空闲时间):同样,主要是软件实践,这一次使用将曲线作为运动、速度或能量输入到组件的任何机械链接的功能。但这里有一个目标:确定在启动输送机以达到其正常速度时,带式输送机的电机是否会出现功率峰值,但因为我们只考虑了行星减速器的转动惯量与精细扭矩(4Nm)相比,我们发现即使是无用的快速启动也不会产生太多峰值(+0.01秒启动时正常功率的1%)因此,这一模拟并没有真正反映现实情况,因为电机还必须启动输送机本身、辊子和放置在输送机上的物品3轿厢闸门油缸放置(2周内8小时以上的空闲时间):我们必须找到移动闸门的电动油缸的固定位置,以降低8秒内打开闸门所需的最大能量(通过两种方式进行了模拟)第一项工作是找到如何使机构均衡,因为在最初的工作中,气缸受到过度约束。完成后,我们能够模拟气缸的多个位置(可以沿两个方向移动阀体,并沿闸门移动活塞端)经过几次组合,并使用excel更好地可视化结果(excel上传到这里,但它相当混乱,至少有相当多的曲线),我发现移动活塞锚的末端只会改变主体锚的可能位置(相对于圆柱体的最小和最大长度)它并没有改变所需的能量。然后,我发现身体锚更适合在极坐标系中观察,因为与门铰链的角度决定了运动开始和结束时所需能量的比例,而这两者之间的距离需要最大,才能使圆柱体发挥最大的效果ctso,最后,最佳位置是将阀体锚定在闸门铰链的45°处,然后移动活塞端锚定,以获得阀体锚定和闸门铰链之间的最大距离(绕风),首先,我们在闸门的最末端施加一个200N的力(任意值),但当我们找到最佳锚定位置时,我们必须使其更加精确,以获得电动气缸的功率值。我们使用了meca3D的流量特性,并对其进行了一些处理,看看每个值都有什么变化。简言之,200N并没有那么糟糕,但风作为流量的值更接近130N,但仍然不确定精确地说,200N是好的,所以气缸必须生产≈110W在消耗250W电力(50%的气缸效率+连杆损失)的同时,利用该功率+气缸内流体的速度,它必须承受31bar的压力4活塞段安装灵敏度(4h):这是在自由但相当黑暗的环境下完成的(不便于用户使用)另一个学校制作的软件:RDM6。我们的目标是要知道,当通过弯曲活塞头来安装活塞节时,活塞节是否即将断裂,或者说,在安装过程中是否需要小心,或者是否需要小心,因为我们必须测量一个真实的活塞节,找到它的材料,然后找出如何模拟活塞节在RDM6“Osature”(只能模拟恒定截面的梁)中编辑此形状我们使用了一个脚本,该脚本从多个梁创建圆弧。如何模拟安装节段的应力,我们选择输入节段一端的位移,以便它可以安装在活塞头周围,该活塞头大于其初始内径。模拟显示,当节段正好位于pis的直径时吨头,它已经是一半,从打破,所以,至少对于这个特定的部分,你必须非常小心地安装it5机械平衡叶片尺寸(4小时+一周的空闲时间):我们谈论的是便宜的机械天平,它看起来像闹钟,碗也用作盖子。我们必须找到弯曲叶片的材料和形状,以确定重量,以便在站立时达到2%的精度。我们对4个叶片进行了模拟,在多个位置使用了重量,这由于4个叶片在重量相同的地方受到相同的应力,因此我们只能在1个叶片上工作,我们发现叶片的厚度是关键尺寸,必须是最精确的尺寸,才能获得精确的平衡。在给定的值下,钢的厚度必须为0925mm,但精确到±0012mm,而e层压叶片最多可以有±0.5mm的厚度变化。我发现只有在最软的橡胶材料中,使用真正柔软的橡胶叶片(但这次厚度大于宽度)才能获得2%的厚度


- 模型大小 :104.12 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,Other,Other,Other,Other,Other,Other,Other,Other,Other,Rendering,Other,Other,Other