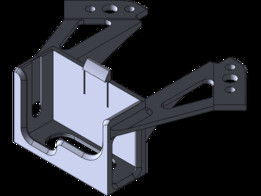
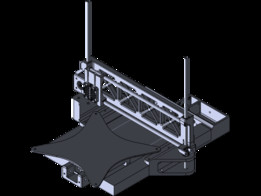
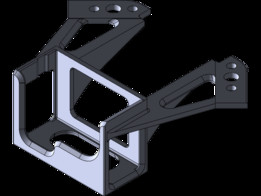
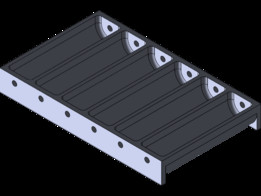
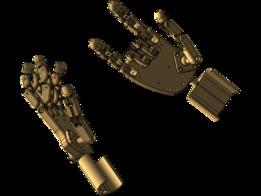
假手2








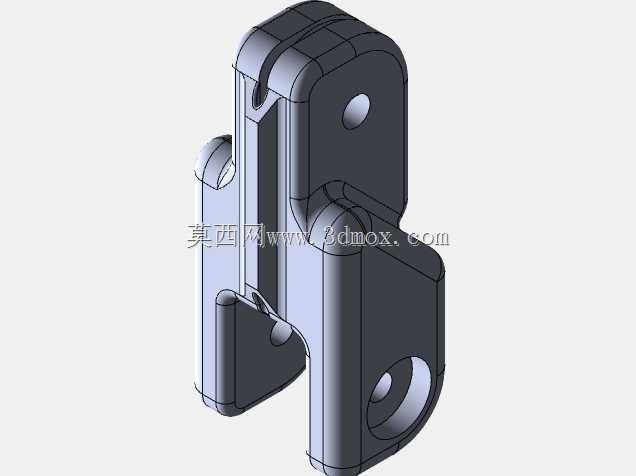












这是一个实验性的机器人修复平台,具有最大的强度和灵巧度,同时非常简单,易于理解、调整和操作。该系统由步进电机、滑轮和与附件对齐的张力线组成,非常像吉他弦装置。每个电机都由一个常用的Arduino/ramp装置与一个额外的外部模块精确协调,该模块管理操作员施加的信号。外部测量仪器传感器需要根据操作员的限制和能力进行定制,以便完全拥有假肢
标签:


- 模型大小 :24.04 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,STL,SOLIDWORKS,STL,SOLIDWORKS,SOLIDWORKS,STL,SOLIDWORKS,STL,SOLIDWORKS,STL,SOLIDWORKS,STL,SOLIDWORKS,STL,SOLIDWORKS,STL,STL,SOLIDWORKS,STL,SOLIDWORKS,STL,SOLIDWORKS