机器人5手柄
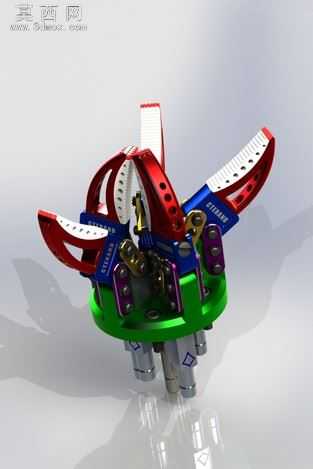
为特定的任务和我将会重新设计它到十六进制-手柄的 DARPA 仿人机器人任务挑战,以帮助在灾难和危险的情况下创建此机器人 5 抓地力。(示例会在日本福岛反应堆情况)请注意抓地力有微移推股中心。我还将上载一步 AP203 版本的 SolidWorks 2012 年创建的程序集。


- 模型大小 :23.68 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :

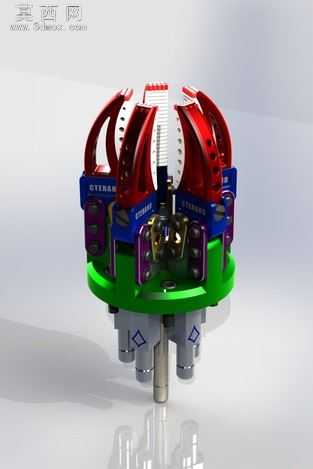


为特定的任务和我将会重新设计它到十六进制-手柄的 DARPA 仿人机器人任务挑战,以帮助在灾难和危险的情况下创建此机器人 5 抓地力。(示例会在日本福岛反应堆情况)请注意抓地力有微移推股中心。我还将上载一步 AP203 版本的 SolidWorks 2012 年创建的程序集。