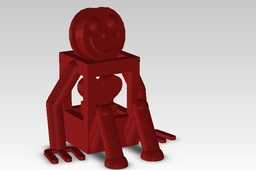
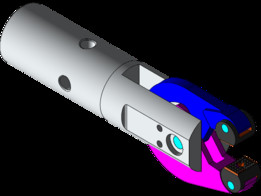
仿人机器人手
我目前正在使用 arduino 这个仿人机器人手的发展、 为检测到的真正的手议案 flex 传感器,使用,然后这个信号发送到 arduino 用伺服的处理的机器人手数字移动连接。有其他传感器太即 accelometers 检测整个手臂运动,以便充分和真正手议案复制。此外,我没有列入接线因为它将使 cad 文件很多更复杂。


- 模型大小 :26.18 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :

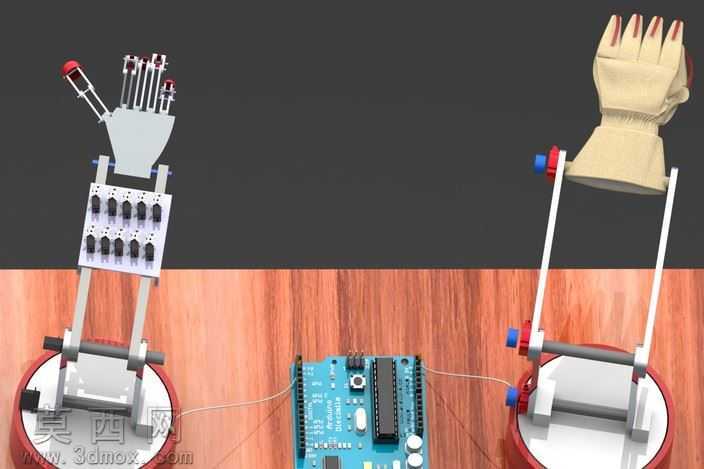


我目前正在使用 arduino 这个仿人机器人手的发展、 为检测到的真正的手议案 flex 传感器,使用,然后这个信号发送到 arduino 用伺服的处理的机器人手数字移动连接。有其他传感器太即 accelometers 检测整个手臂运动,以便充分和真正手议案复制。此外,我没有列入接线因为它将使 cad 文件很多更复杂。