RoboSavvy人形机器人的设计-MV-03
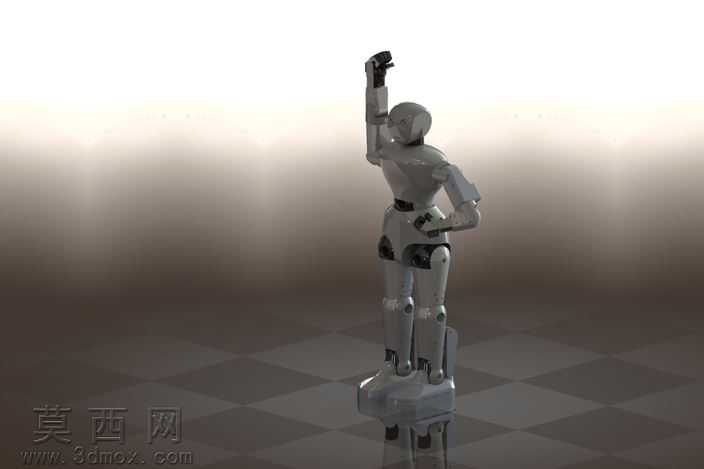
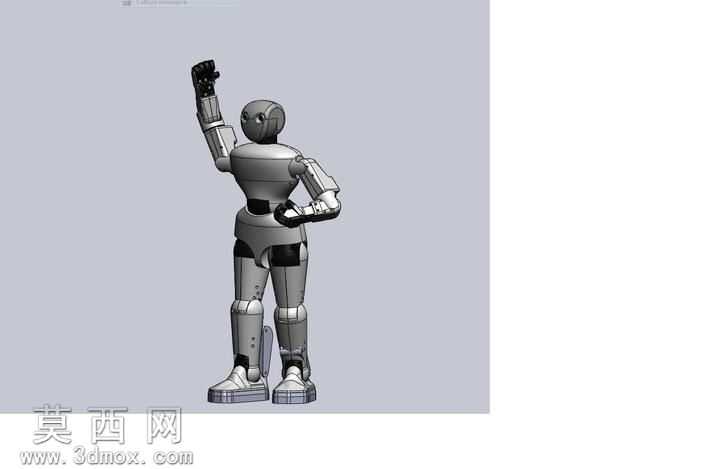

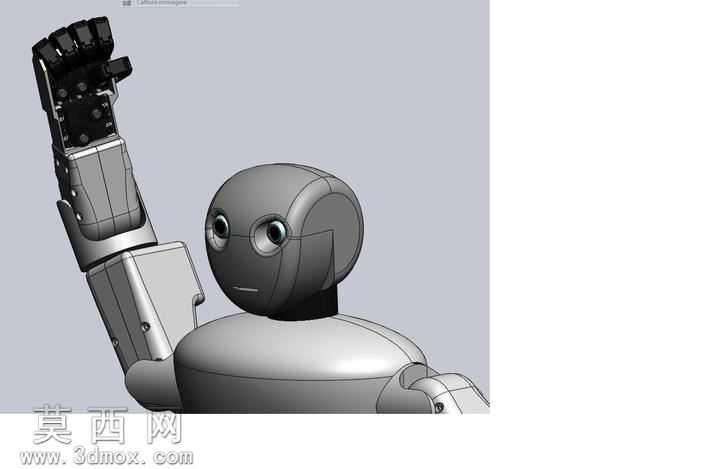
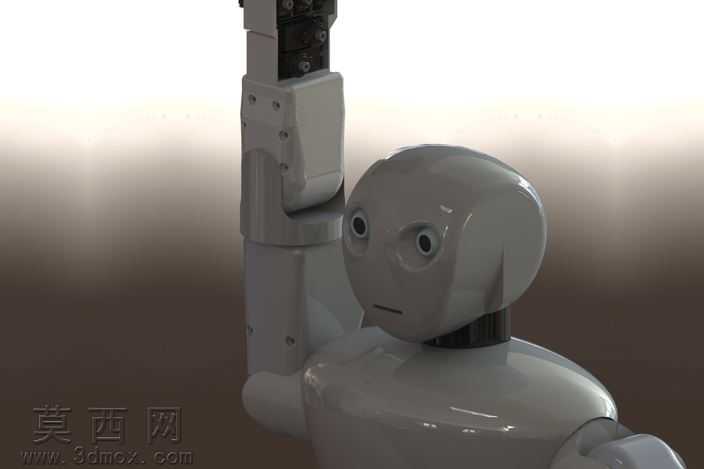
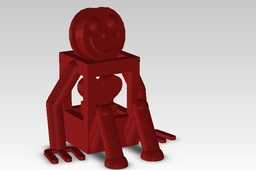
这是我的人形机器人的新版本。
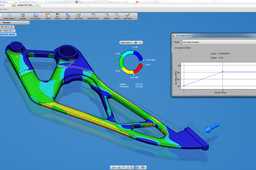
当我学习封面的铝支架时,我问我为什么不删除铝支架和实现 3D 打印机的所有结构件?
并以这种方式做了它 !在此我试图实现也参与到我的机器人的外观的部分我的研究。
规格:
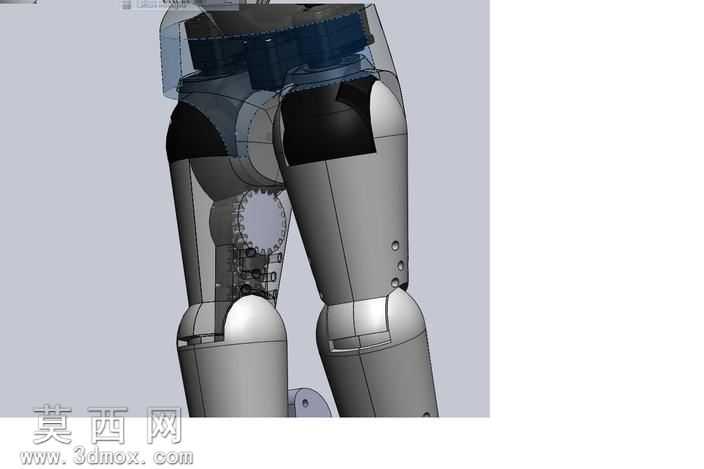
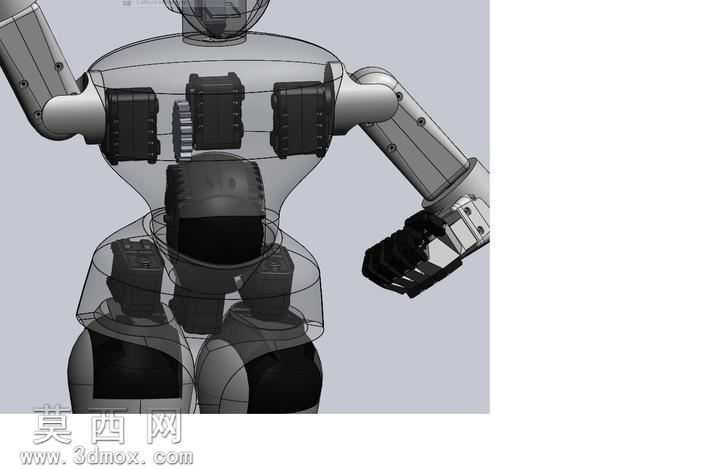
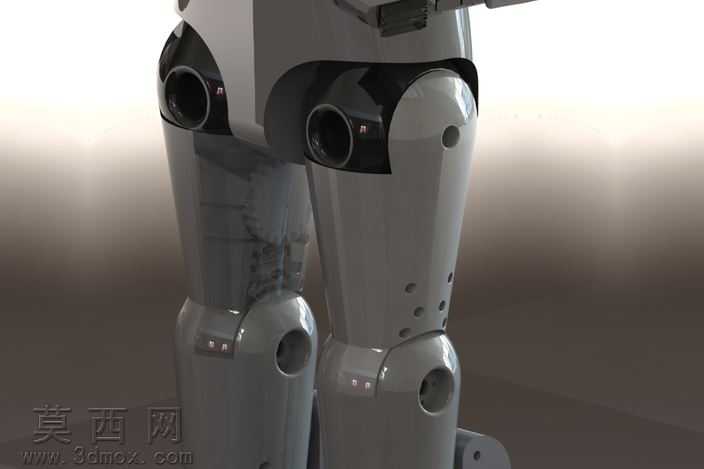
-36 DOF 3 自由度树干,为每个胳膊 4 自由度、 5 自由度每个手和头 3 自由度的每条腿的 6 自由度)。
-2 101 的锂电池,每个脚为
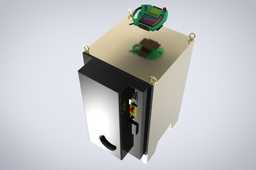
-BeagleBone 黑色微型控制器。
-3D 可打印覆盖和结构。
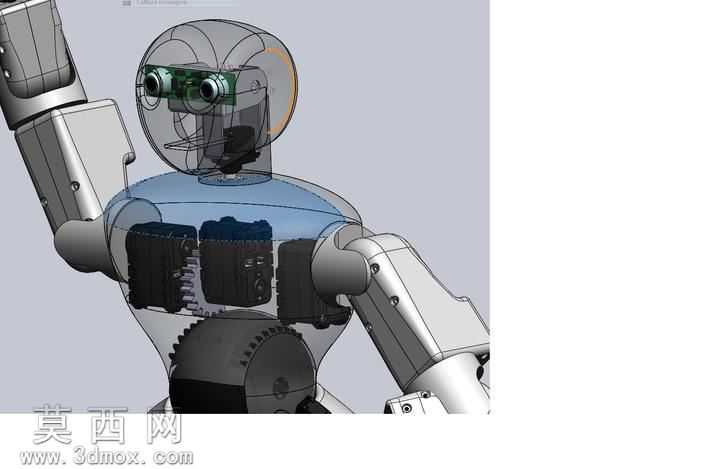
-胸部放一个惯性测量组合单位中的空间。
.3D 网络摄像头 (像稔凸轮) 的头。
标签:
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :18.29 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :