美国国家航空航天局代码547创新实验室机器人手重新设计
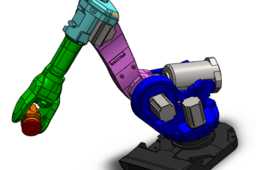
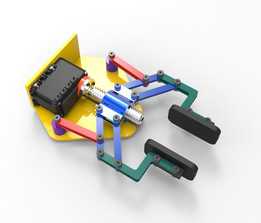
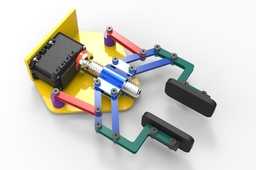
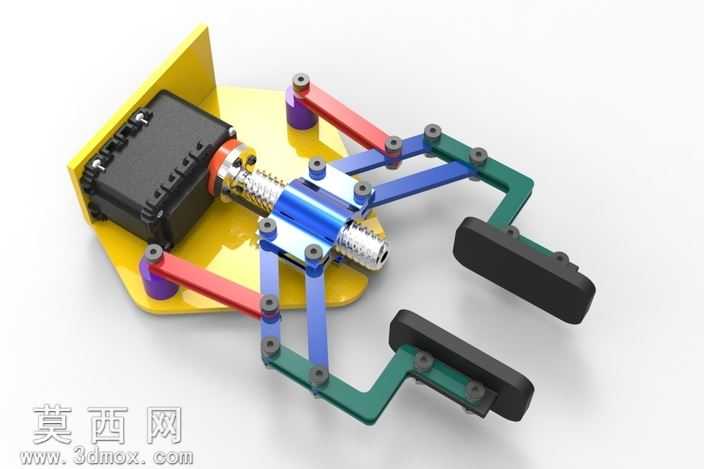
机器人手臂工具包和拿起一个鸡蛋来模拟微妙部件的目标,给了我们。所以我被指派来设计一个新工具包中的夹并不是为此应用程序的 kiind。
这是我的一个第一次设计项目没有任何真正外部的帮助。我有很多工作要我时来设计意图和修订控制,虽然今天发现工作台。


- 模型大小 :51.94 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :

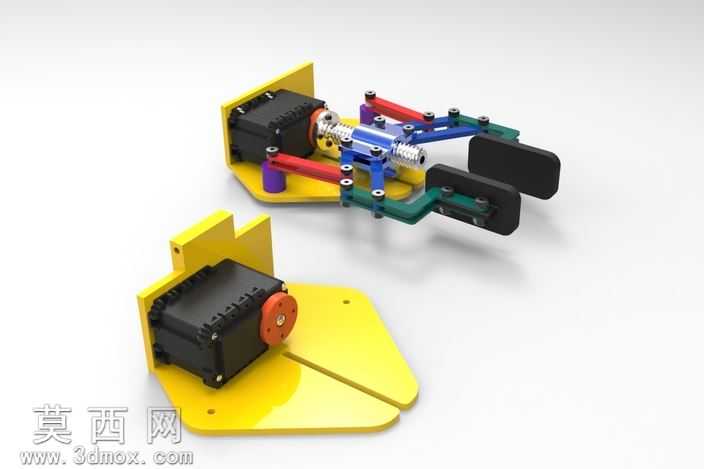
机器人手臂工具包和拿起一个鸡蛋来模拟微妙部件的目标,给了我们。所以我被指派来设计一个新工具包中的夹并不是为此应用程序的 kiind。
这是我的一个第一次设计项目没有任何真正外部的帮助。我有很多工作要我时来设计意图和修订控制,虽然今天发现工作台。