并联SCARA机器人机构
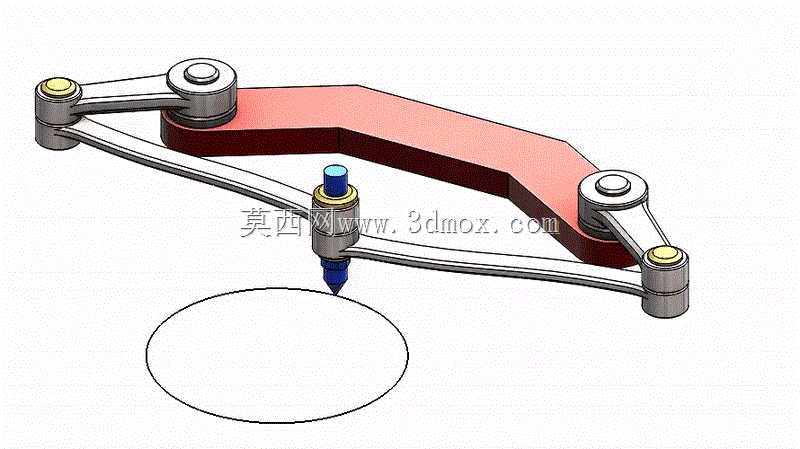

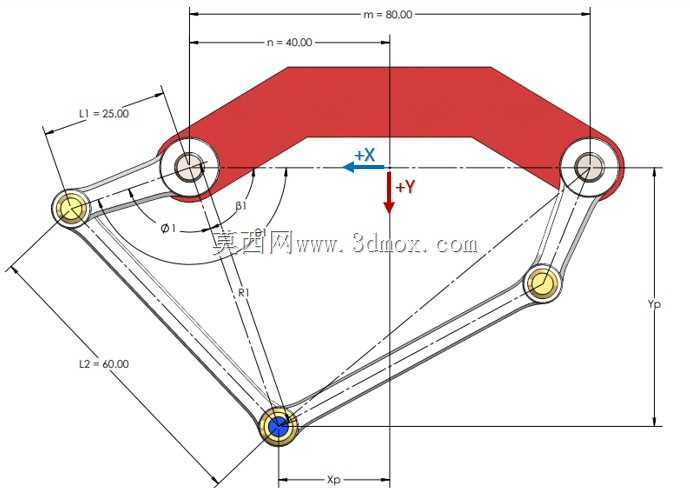
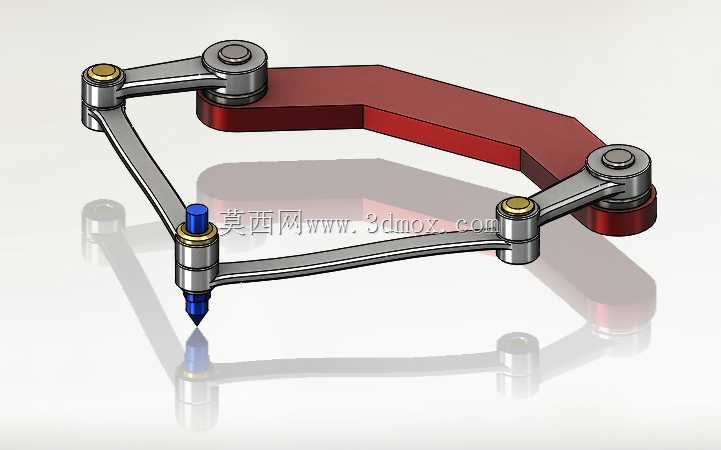

基于五杆机构的机器人运动学。该机构由两个同步运动的伺服/步进电机控制,以获得末端执行器的特定位置。该机构是在二维区域(X和Y)工作的平面机构。检查“https://erobtic.wixsite.com/erobtic/post/parallel-scara-robot-mechanism有关反向运动学的详细信息
标签:


- 模型大小 :12.13 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering