四面体陀螺仪-稳定、推进,反重力
全方位陀螺稳定装置的设想,可以工作在微重力不受任何引力参考作用的力。
一些相反的对与一个共同的轴陀螺仪,形成不同的几何形状来实现最优配置这些需要达到绝对稳定。
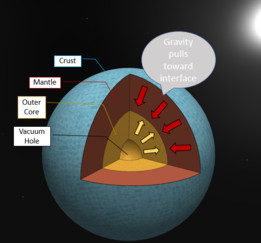
推断的是,这个multi-gyroscopic装置,当所有单个陀螺旋转相同的频率,有能力,形成自身的重力引用独立于其他任何身体的距离。
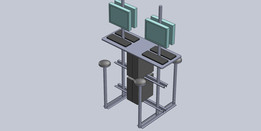
最基本的三维形状是一个四面体――四个三角形脸加入三个边缘。
将构造一个四面体骨架使用方成员作为轴,安装两个定向反对陀螺仪,总共六双陀螺仪。
最初的设备规模将增长和增加更多的四面体组件组成一个更大的陀螺仪四面体组合。
micro-gravitational环境的优点是装置不增加重量的旋转组件的配置。
在一个常规陀螺旋转,旋转构件的重量变得轻便,而不是安装在结构或框架。
一旦大安排的单身四面体陀螺组装,测试propulsionary力是通过减少same-oriented陀螺的旋转频率对。
被测试是这样的安排是否会朝着这个方向发展。
因此,所有的可能的组合的运动装置的设想,其安装到正确的位置。
如果这个推进实质性的,那么一个有前途的发现空间没有燃料的推进是实现。


- 模型大小 :2.82 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :