机器人抓取挑战的恐怖之塔

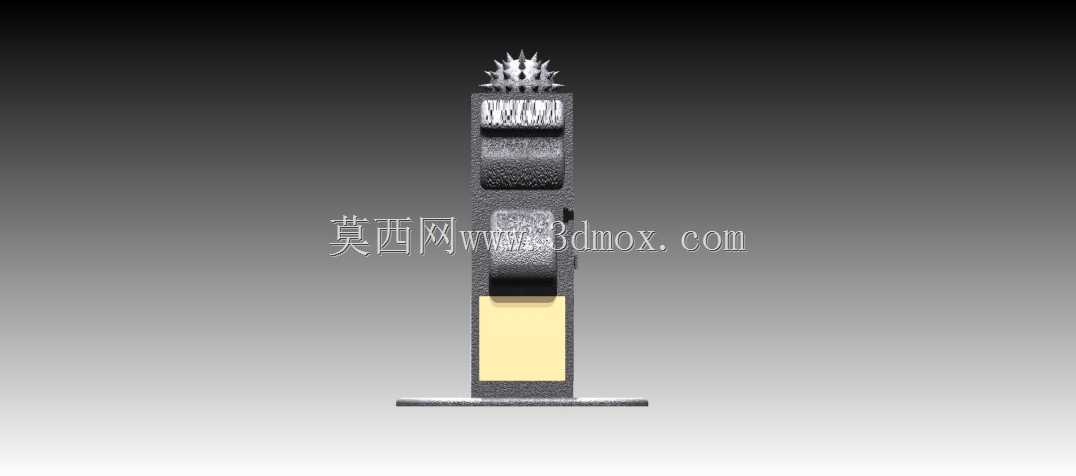


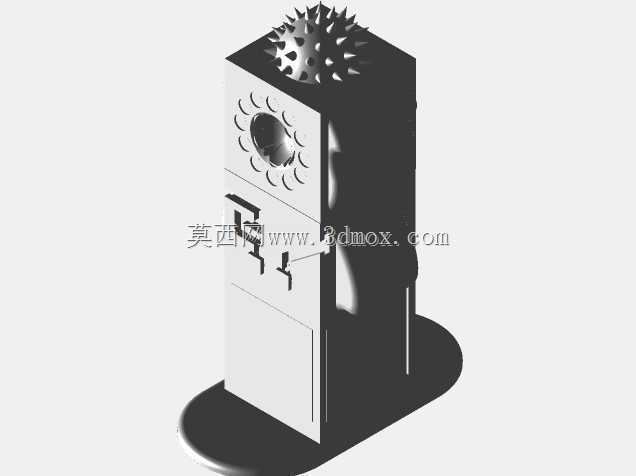
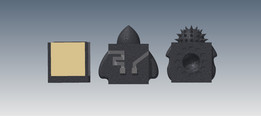
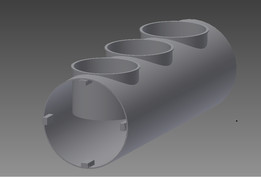
该塔由三个主立方体组成,三个不同类型的立方体用于不同类型的夹持器。这座塔的概念是为了评估机器人末端叛逃者难以拾取的几何图形。顶部立方体用于测试versaball型机器人手臂和手指型机器人手臂。中间的立方体集中在多指机械臂、钳形夹臂和磁铁机械臂上。底座上的底部立方体用于评估吸盘式机械臂和多指与吸盘式机械臂组合。该结构可以进行3d打印
标签:


- 模型大小 :8.73 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Rendering,STEP / IGES