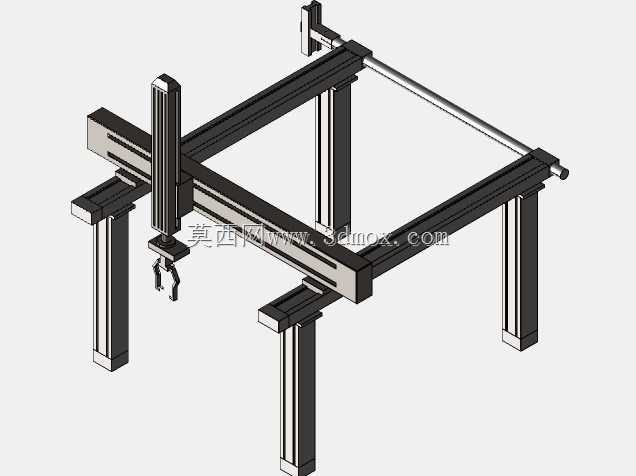
笛卡尔坐标机器人
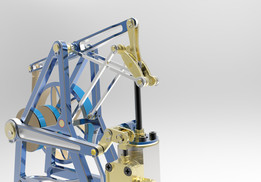
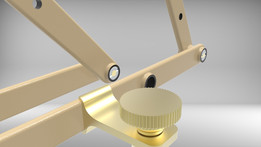
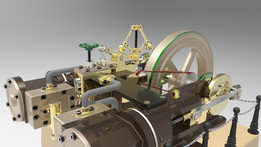
这是一个笛卡尔坐标机器人,可以在三个方向移动;它的抓手可以360度移动来抓取不同的重量。这是为工业自动化设计的,也用于3D打印机。注意:这里的夹持器还没有完全组装好,稍后我会补充#Solidworks18#按键7。二,
标签:


- 模型大小 :5.88 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering



这是一个笛卡尔坐标机器人,可以在三个方向移动;它的抓手可以360度移动来抓取不同的重量。这是为工业自动化设计的,也用于3D打印机。注意:这里的夹持器还没有完全组装好,稍后我会补充#Solidworks18#按键7。二,