不同的方法|凸轮机构
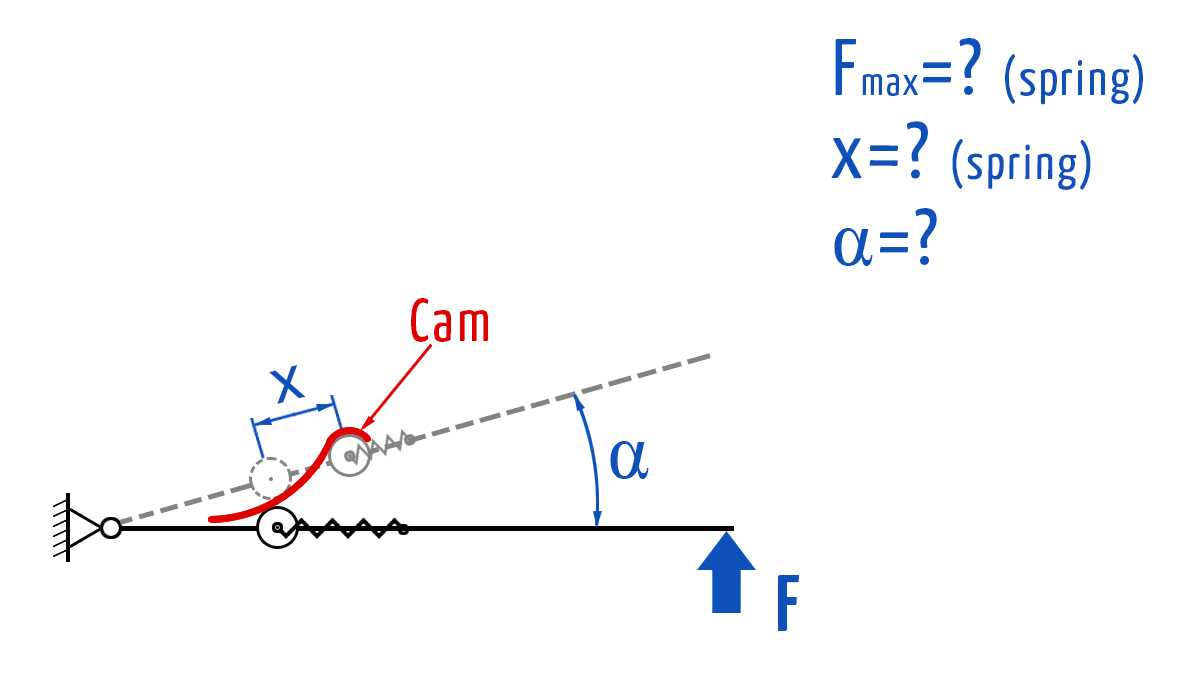
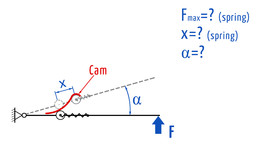
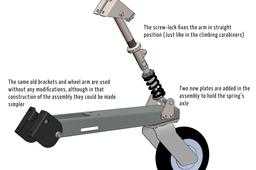
我想建议在稳定腿悬架中采用不同的方法,而不是使用杠杆机构、凸轮和从动件。一些重要的参数是必要的――弹簧可以被压下的最大力(Fmax)(我猜是1200磅)、距离(x),即弹簧在被压下最大力后的缩短,以及角度(α)――臂可以形成的最大允许角度。利用这些参数可以制作凸轮轮廓。优点和缺点:这样做的好处是,最大允许参数是用于计算的初始参数,使用时机制不会超过这些参数。结构很简单。必须保留的基本部件将被使用。最大的缺点是,这种机制可能根本不可能实现。参数可能不允许这种构造。这个想法取决于这三个参数。如果我有时间,我可以试着做一些模型,但现在我发布这个只是为了提出一个建议,并最终给其他想玩它的人一个想法。我希望这个图表足够清晰,可以理解它。欢迎所有关于该主题的评论和讨论


- 模型大小 :162.42 KB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering