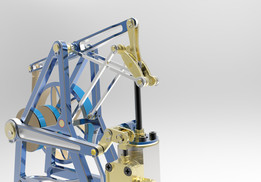
第五轴物体跟踪器
这个项目演示了如何使用第五轴来执行对象跟踪。借助机器人操作系统(ROS)的强大功能,Kinect v2 3D摄像头用于识别物体的位置,从而允许第五轴跟踪物体。在相关的YouTube视频上可以看到该实现。有关GitHub上源代码的链接,请参见YouTube视频描述


- 模型大小 :4.36 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Fusion 360,Rendering


这个项目演示了如何使用第五轴来执行对象跟踪。借助机器人操作系统(ROS)的强大功能,Kinect v2 3D摄像头用于识别物体的位置,从而允许第五轴跟踪物体。在相关的YouTube视频上可以看到该实现。有关GitHub上源代码的链接,请参见YouTube视频描述