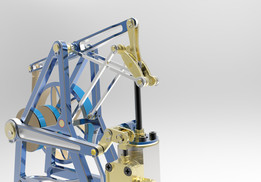
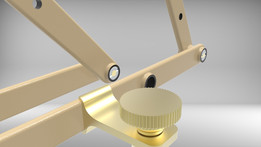
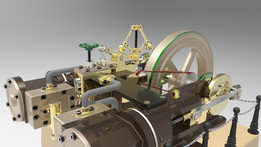
机械臂
嗯。。。首先。。。。这是一个不完整的模型。。。我的笔记本电脑不支持大型组件,开始落后。。。。所以,我只是上传了一些不完整的组装件。。??...希望你能理解。它是基于想象的机器人手臂,具有可变的拳头姿态,在技术上和逻辑上都是适用的。。。。概念


- 模型大小 :7.48 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering


嗯。。。首先。。。。这是一个不完整的模型。。。我的笔记本电脑不支持大型组件,开始落后。。。。所以,我只是上传了一些不完整的组装件。。??...希望你能理解。它是基于想象的机器人手臂,具有可变的拳头姿态,在技术上和逻辑上都是适用的。。。。概念