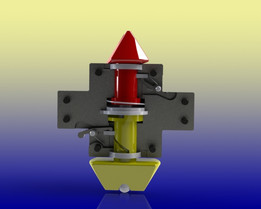
自动扭锁概念



该项目基于现有的扭锁,但也有一些不同之处:-基于helisa线的导向机构,锁柜的扭锁是自动的。正因为如此,插入更容易、更快,而且不需要手动锁定。-移除是全自动的(当连接器安装在角落并“接触”地面时,连接器将自动解锁)解锁是全自动的1。扭转锁柜:通过杠杆引导机构推动角落,从而转动锁柜。当储物柜旋转90度时,拦截器将在这个位置阻止储物柜。在上部,阻挡器是一根轴,它被阻挡在体内。当锁柜旋转90度时,弹簧将轴向下移动,特殊的榫头将锁柜卡在该位置。在下部锁柜中有一个类似爪形离合器的带孔护罩。当储物柜转动时,弹簧会将储物柜转动,并将储物柜堵塞在该孔中。2.拆卸:当挡块轴接触地面时,榫头离开孔,锁紧器转向中性位置。3.解锁。当集装箱向上系泊(跳跃或被起重机吊起)时,迫使储物柜与其一起系泊。然后,锁柜从离合器挡块孔中取出并解锁。但是,为了避免不必要的解锁,储物柜上的引导轨道将引导机构放置在直升机上。然后,如果集装箱只跳下,它将再次锁定,但如果起重机操作员只是稍微降低它,然后再次提起它,储物柜将完全解锁
标签:


- 模型大小 :4.41 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering