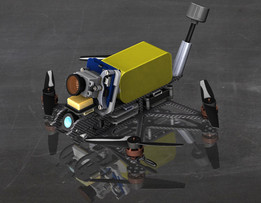
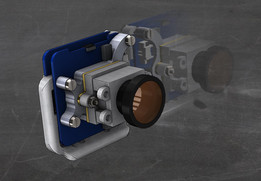
Titmouse 3英寸fpv框架四架直升机







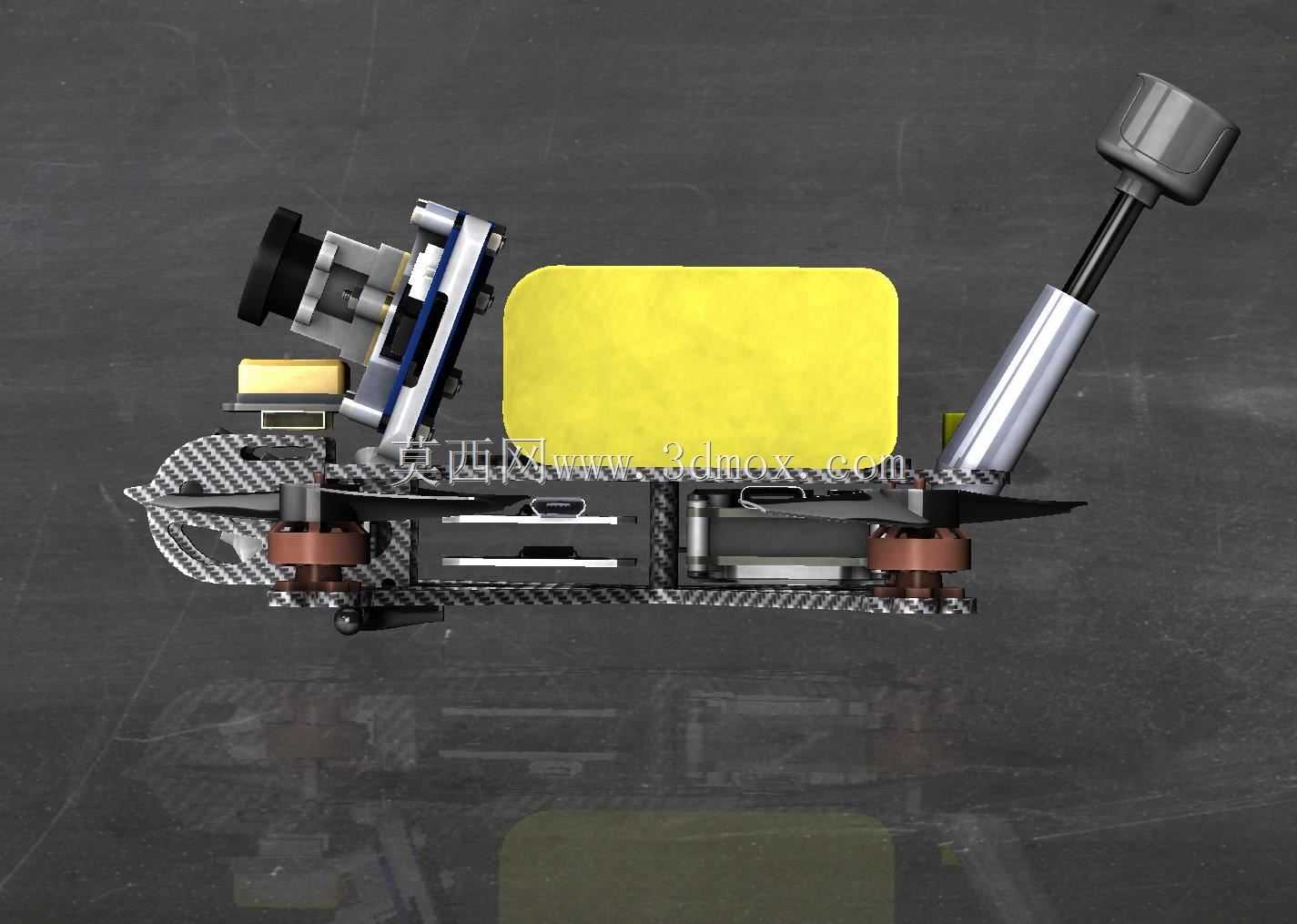
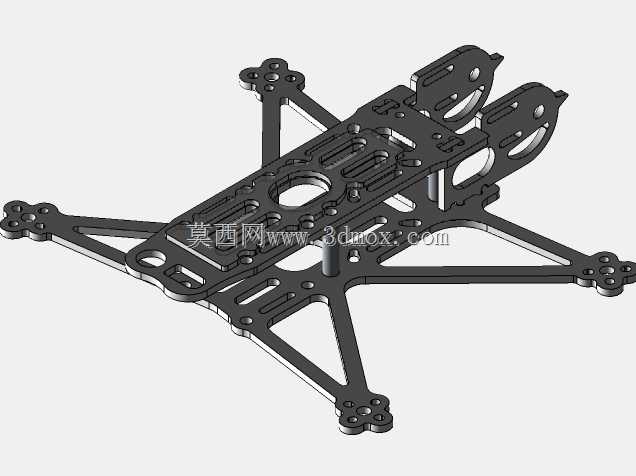

















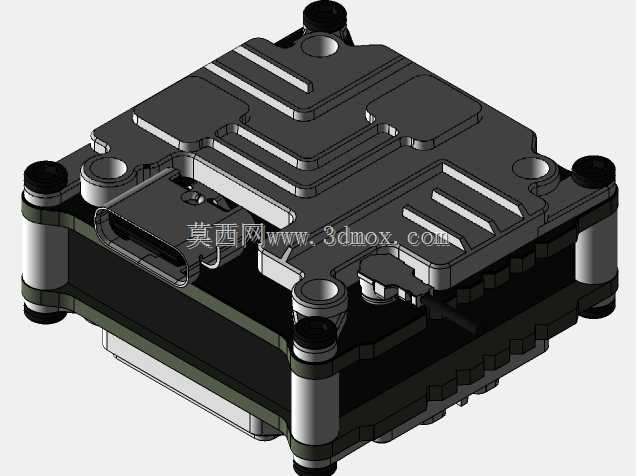























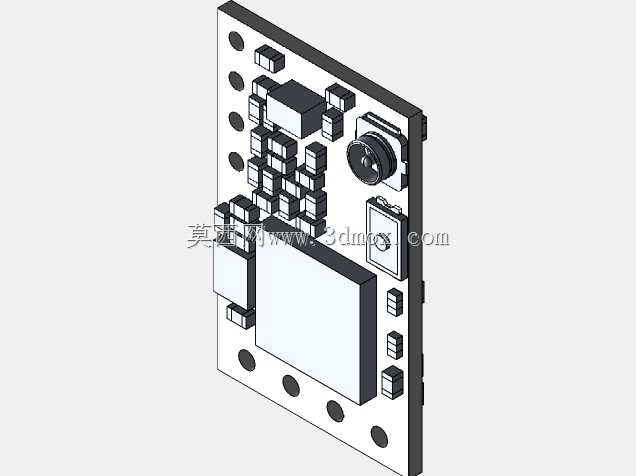











我展示了我设计的fpv四旋翼机的第二个框架――Titmouse(fpv四旋翼机框架)。该框架包含几种配置:用于连接器xt30、mt30(较难打开),用于3D打印(较厚的臂)。所有成分的最终重量为120克。框架本身是20克。我认为,对于一个拥有完善的gps+指南针和数字视频系统的组件来说,这是一个很好的结果。650-800毫安时电池电量小于249克。功能――这可能会引发问题。为了追求重量、紧凑性和重心位置尽可能靠近螺旋桨的平面,我将框架尽可能窄。所有框架仅由一块厚度为2mm的碳纤维制成。对于3英寸的螺旋桨来说,这已经足够坚固,可以从黑匣子日志中看到。我使用pid_分析仪在inav上配置了以下pid:设置mc_p_俯仰=30设置mc_I_俯仰=45设置mc_d_俯仰=14设置mc_p_横滚=26设置mc_I_横滚=40设置mc_d_横滚=12设置mc_p_横摆=35设置mc_I_横摆=40我承认设置不理想,但在轻电池(高达1000mah)上,它飞行平稳,没有抖动和振荡。对于组件,感谢Caddx vista-@persopolo matek m8q-@orcy。wagh-1电池cnhl-@francesco。giudice-1tbs不朽-@johan。sjolin-2TB nano-@craftedkwads-1灯光控制器和ESC-@mitch。polly-1lollipop-@aisak-2xt30-@qianyong。lei-1gemfan 3025-@baptiste。cherblanc-1
标签:
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :36.24 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering