2020年夏季?转向




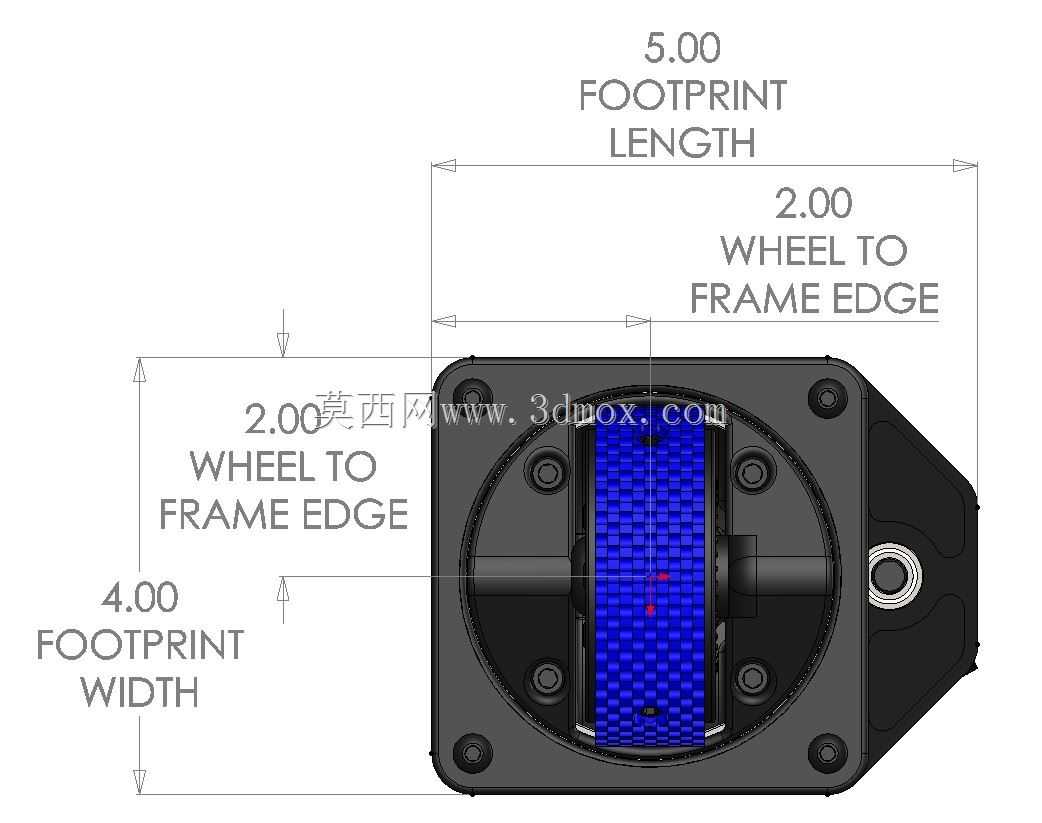
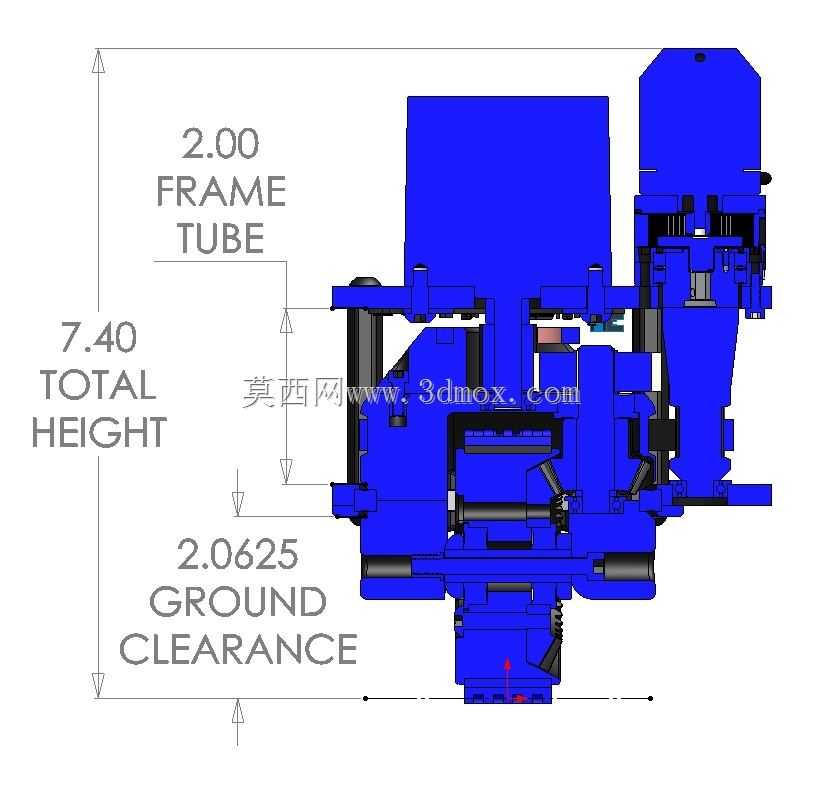
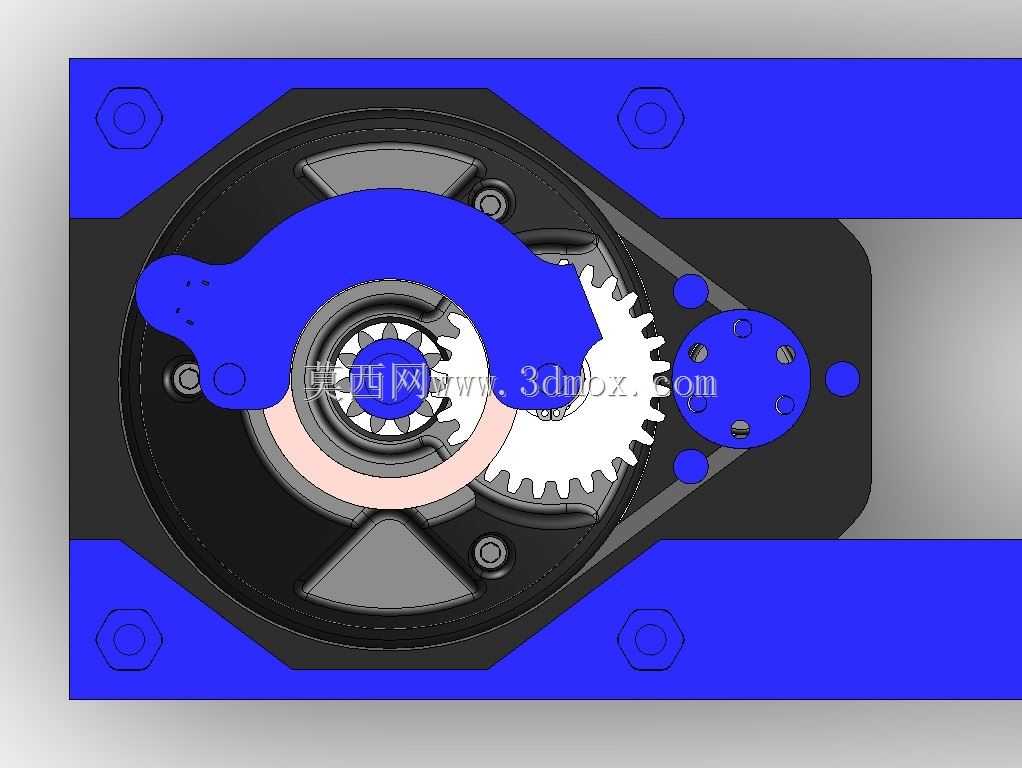
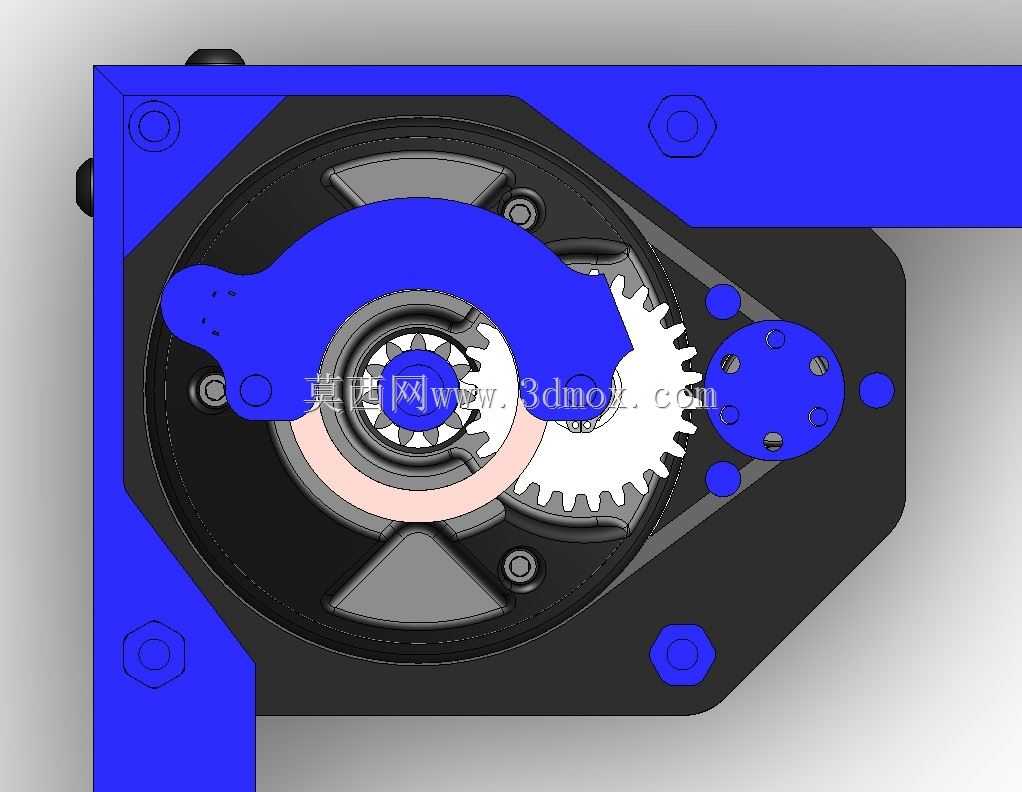
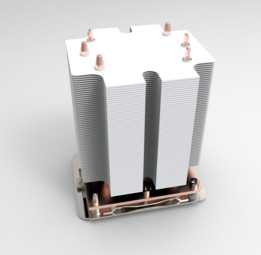
这是我过去几年一直在研究的转向驱动模块的最新迭代。对于以前的迭代,请查看此线程2。总的来说,这个迭代继续变得更小、更轻。此外,此迭代使用Neo550进行转向,其上有一个单级超行星齿轮箱。这有助于进一步减小模块的尺寸和重量。模块的一些总体规格:从框架边缘的全尺寸:4“宽x 5”长x ~ 7.4”高从框架边缘到轴距的车轮距离:从框架两侧的2”全重:~ 3.45lbs(SW质量特性,所有零件要么根据COTS报告的重量分配重量,要么使用正确的材料;打印零件根据Eiger分配的估计重量)传动比为20: 40伞齿轮比,电机的第一正齿轮级为10/11/12:28。也可选择9:30或13/14:26。驱动速度(自由速度):12.16fps(09:30第一级)13.27fps(10:28第一级)14.59fps(11:28第一级)15.92fps(12:28第一级)18.57fps(13:26第一级)20.03fps(14:26第一级)转向比为5:1(5.23:1实际)超行星齿轮箱,其次是16:86 GT2皮带级。总比率为28.1:1,自由速度约为391rpm。转向位置由安装在吊舱顶部的Lamprey编码器确定。可使用n550上的编码器进行本地控制以定位。模块是对称的,允许为左侧和右侧模块制作相同的零件。模块的设置也使其可以方便地安装在标准框架或带有保险杠/框架切口的框架上。明天我会发布另一个版本,驱动电机翻转,转向电机降低。此版本的高度约为5.5x5.5英寸,但只有6英寸高,因此可以选择安装在保险杠高度下。此版本的重量为4磅
------分隔线----------------------------
- 上一篇:2020年夏季?翻转转向
- 下一篇:33杀人蜂2019年休赛期冬季转向

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :75.14 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering