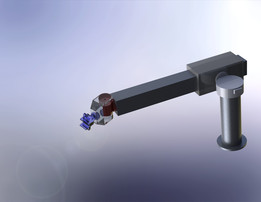
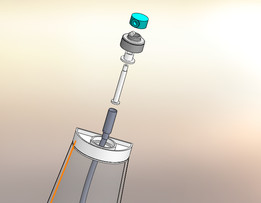
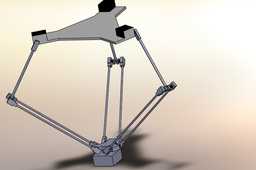
机械手
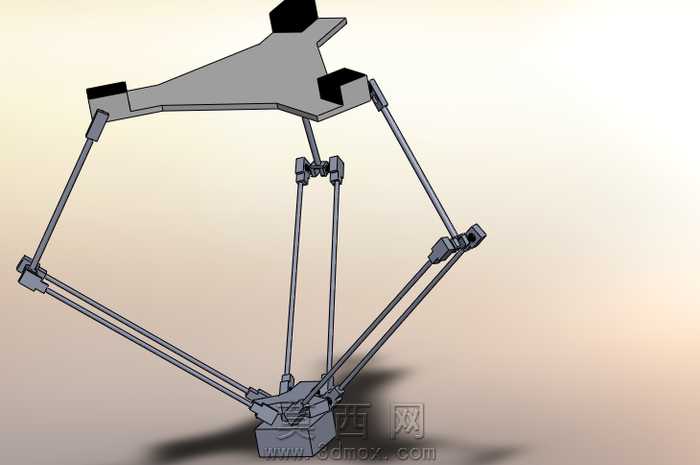
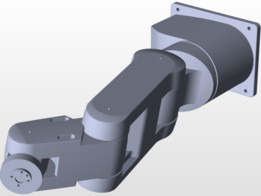
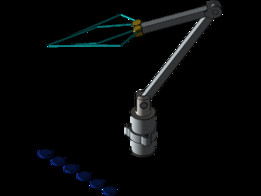
RSSSS 机械手的体系结构:
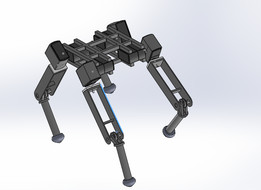
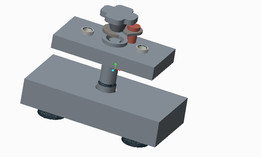
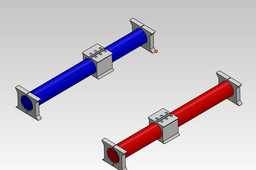
经修订的 RSS 体系结构具有两个额外的冗余球形联合对转换为
RSSSS 体系结构。修订后的体系结构是以下的功能:
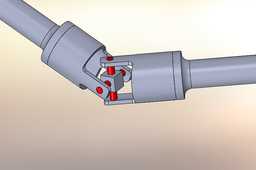
1.一个规化和四个球形接头。
2.有两个冗余关节的 SS 对串联在与另一个 SS 对窗体中。
3.末端执行以来的额外的 SS 对克制旋转自由度模型 3 平移自由度模型。RSSSS 体系结构最终被选为进一步的发展。过去一
时间,将一个开动的间隙关节放在结束 effecter 提高灵活性的工件或工具在工作区中的方向增加了额外的旋转自由度。


- 模型大小 :1.87 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :