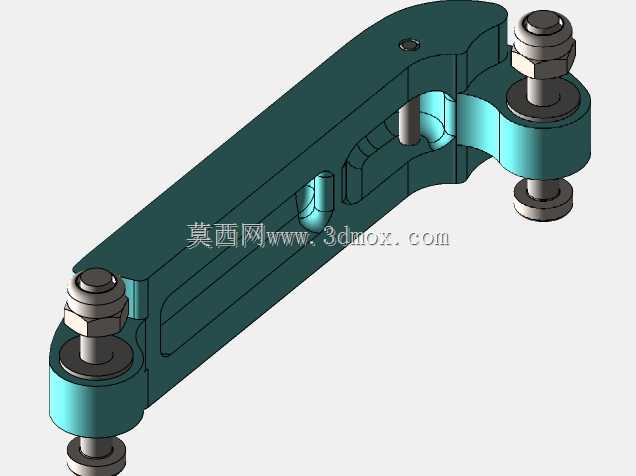
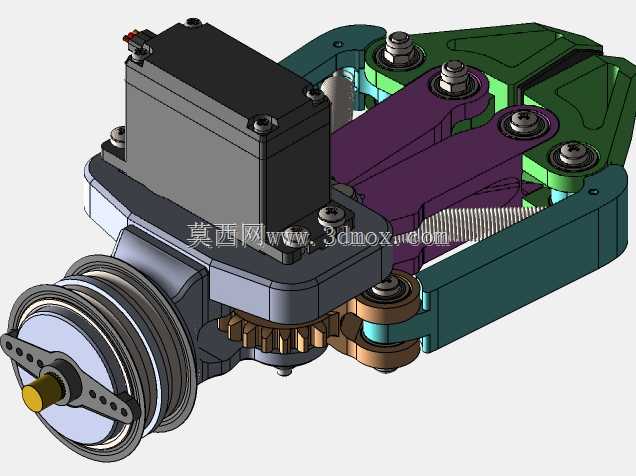
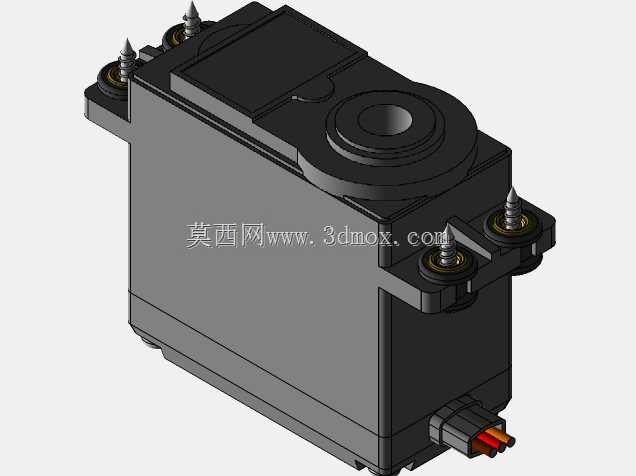
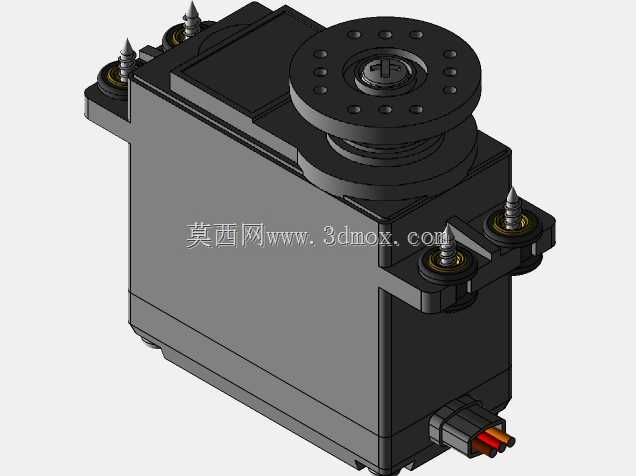
自适应机器人夹持器
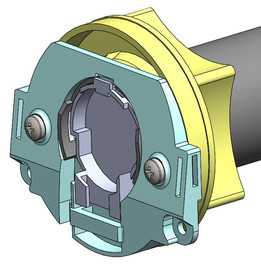
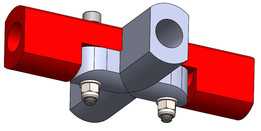
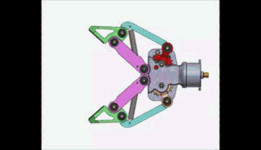
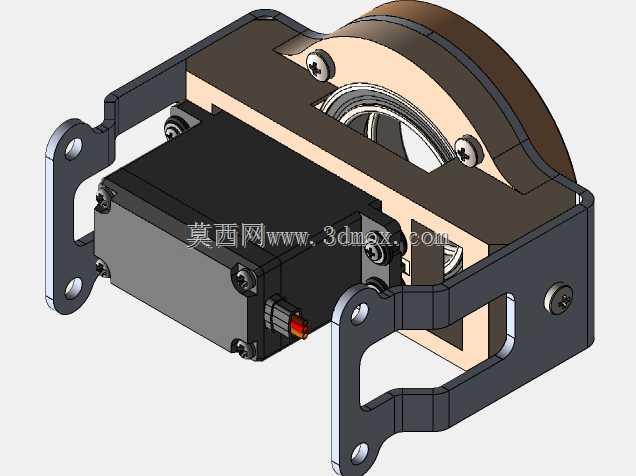
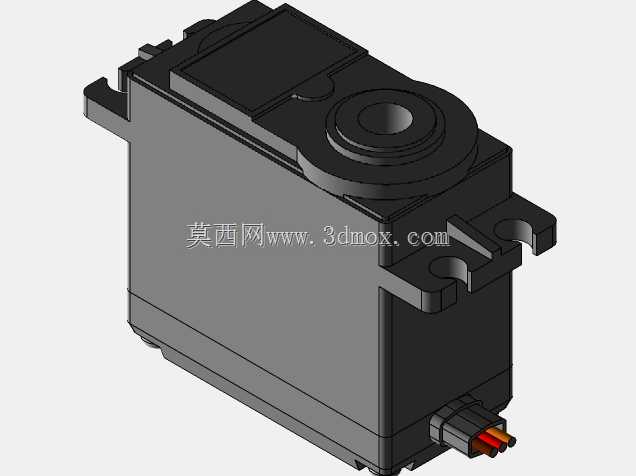
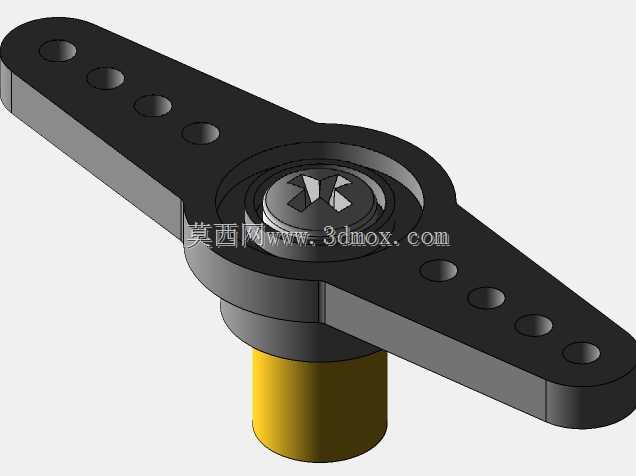
它是一种自适应机器人夹持器,由伺服电机驱动。完整的模型是“集成pince&poignet.sldasm”。所有零件均设计为3D打印
标签:


- 模型大小 :75.67 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES,SOLIDWORKS,Parasolid


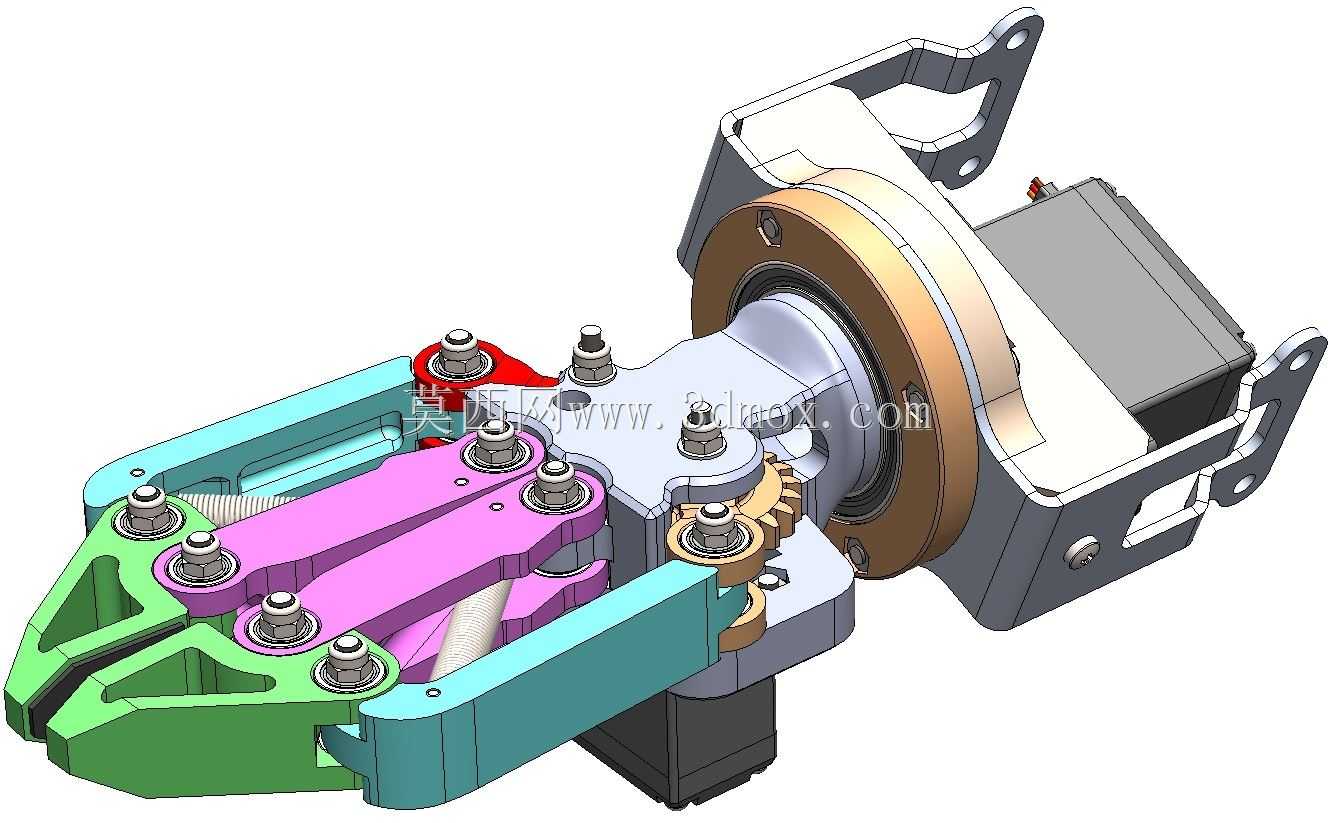
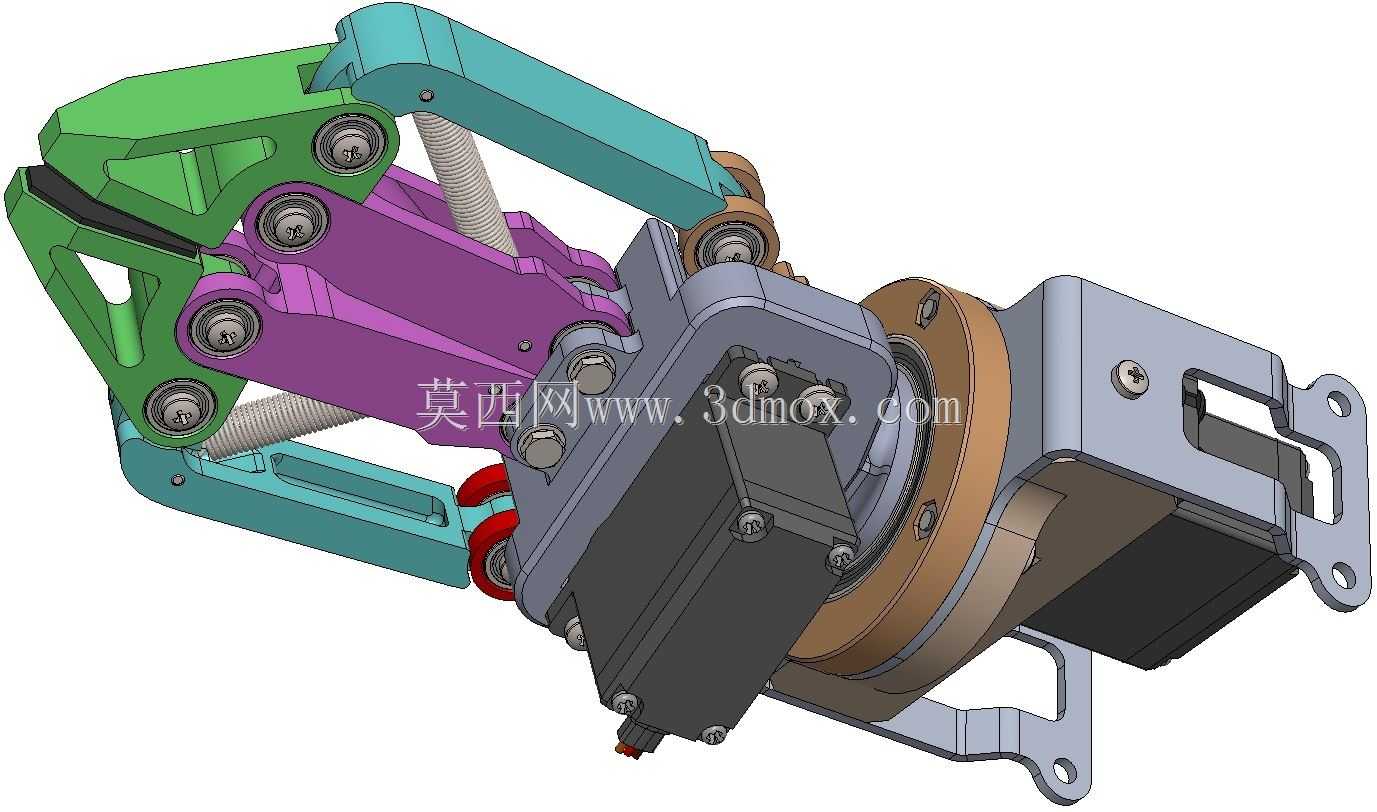
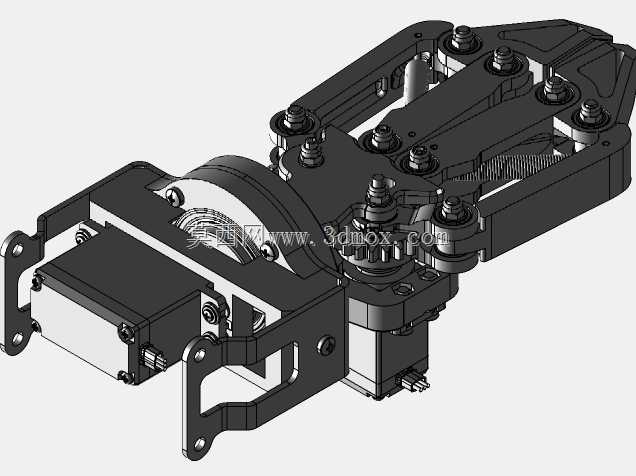
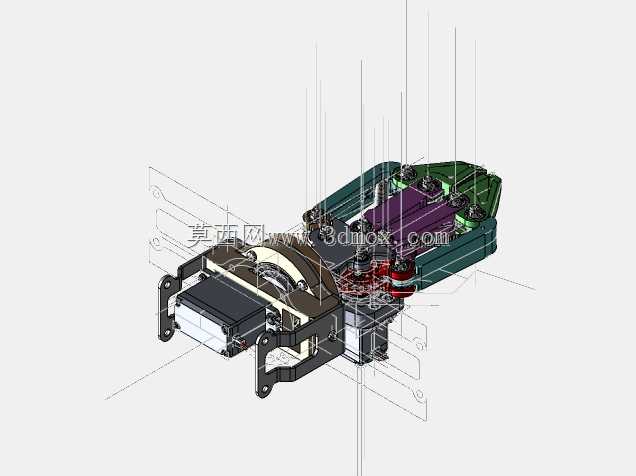


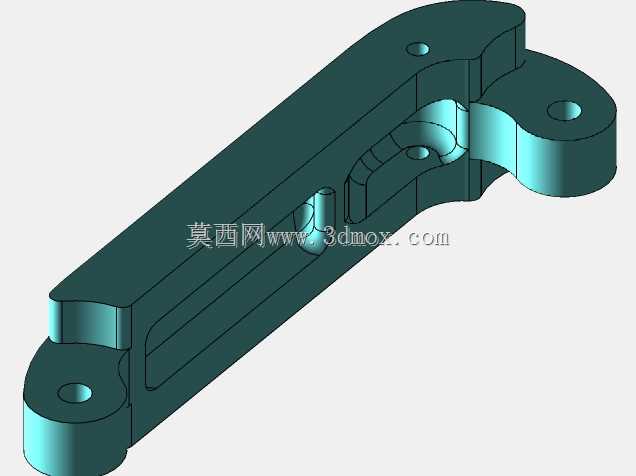
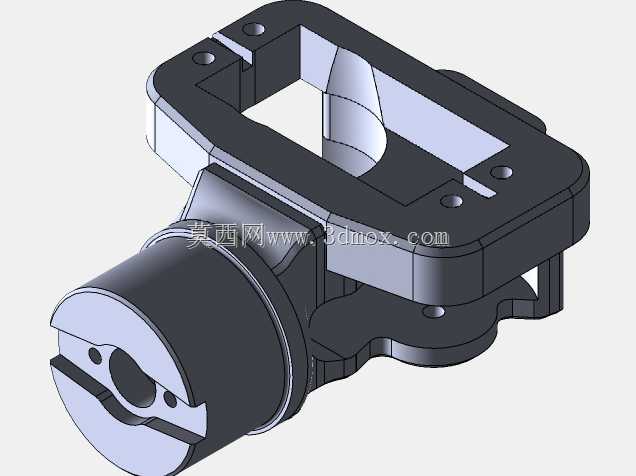



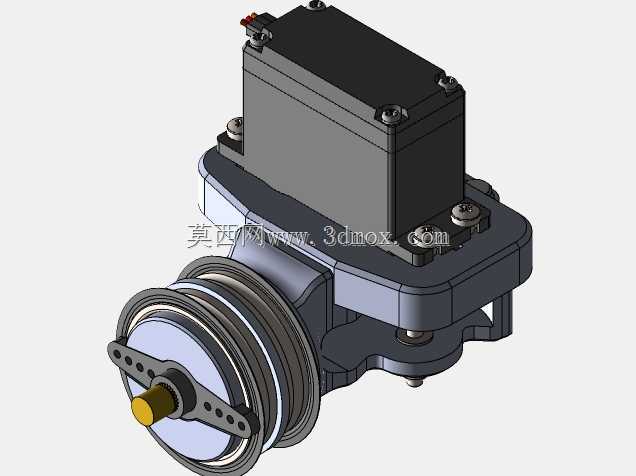
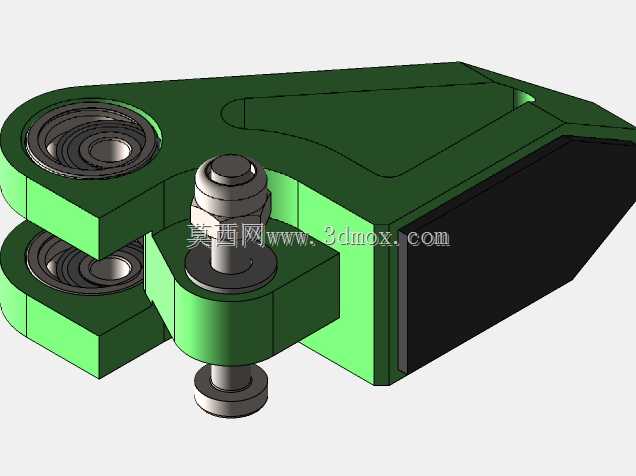
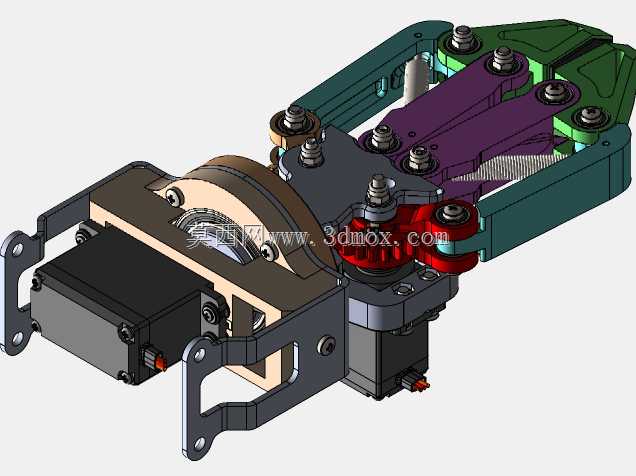
































它是一种自适应机器人夹持器,由伺服电机驱动。完整的模型是“集成pince&poignet.sldasm”。所有零件均设计为3D打印