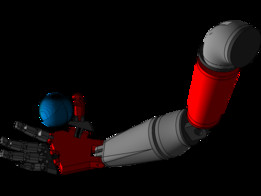
臂机器人

该项目开始的目的是为类人机器人/安卓机器人设计手臂结构,即设计一种可编程手臂,该手臂可以通过外骨骼、手势或任何计算机设备上的接口以多种方式进行控制。从辅助手臂机器人到外科手臂,应用范围广泛,人们感兴趣的主要领域是从设计、动力学和抓取动作方面了解人类手臂结构,并尽可能将其进化效率融入机器人手臂。虽然主要的挑战是在每一个可能的层面上纳入精度,但我们已经通过CAD建模取得了进展,我对CAD建模做出了广泛贡献,并在ROS的GAZEBO仿真平台上模拟了结构的运动学
标签:


- 模型大小 :1.11 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS