先进采矿技术-RASSOR铲斗滚筒






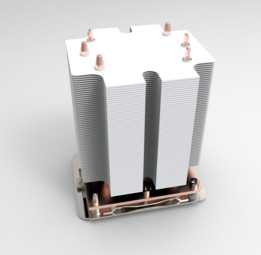
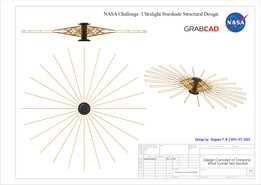
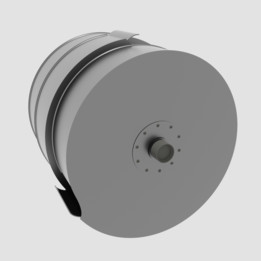
这是AMT RWTH亚琛大学学生项目团队为“NASA RASSOR桶鼓设计挑战赛”设计的草图。这种设计有三个分区,每个分区一个电铲。该设计的主要思想是在加载和卸载期间使用超临界和欠临界转速。在材料开挖和转鼓装载过程中,超临界转速提供了高离心力,从而克服了重力,导致开挖的表土粘附在铲斗转鼓的外围壁上。因此,在所提供的加载期间,填充率将非常高。当前的设计基于一个概念,即根据动态灌装过程的效率,目标灌装量为滚筒总体积的75%。放电期间,转速低于临界转速。因此,表土从墙壁上脱落,并在重力作用下离开铲斗,滚筒将卸载。作为卸载辅助,一个或多个简单的卸料翼连接到靠近入口勺的内滚筒外围。该铲斗滚筒具有非常简单的设计和功能,这在无需任何维护和维修的远程操作中是一个主要优势。我们第一次设计中使用的滚筒材料是钛,用于外壳和侧板。切削刃可以由具有高硬度和耐磨性的硬化钢设计。每个滚筒的总质量约为4.7 kg,装载量约为33升。驱动配置可以是电流RASSOR的传统驱动,也可以是位于测距臂末端、与滚筒同心的齿轮电机驱动。提供的CAD文件显示了一个集成的齿轮电机,但可以很容易地用轴替换。更多信息和完整说明可在随附的pdf中找到。当前设计状态的技术数据:在任何给定时间接合的铲斗的最大总宽度:120 mm最大铲斗鼓质量:4.7 kg最大铲斗鼓直径:450 mm铲斗鼓长度:360 mm否。每个滚筒的隔室数量:3个。每个隔间的勺子数量:1可变滚筒旋转:?充电转速约为43 rpm?排放转速约为15 rpmA捕获的表土目标体积(总Rassor,4个滚筒)?超临界旋转约为132升?停止旋转约为100升
标签:


- 模型大小 :48.64 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STL,Other,Rendering