PID控制的自平衡避障机器人
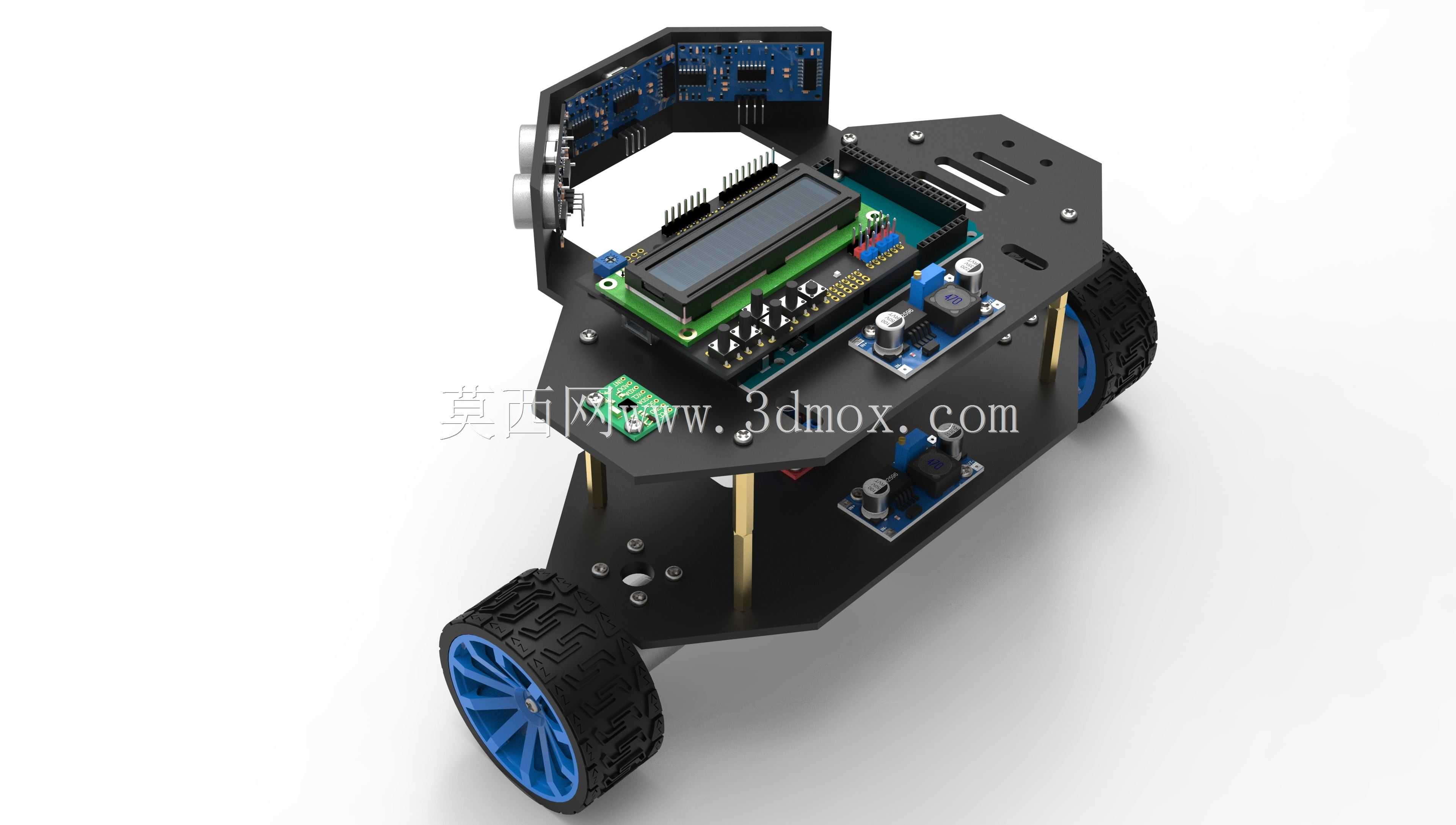


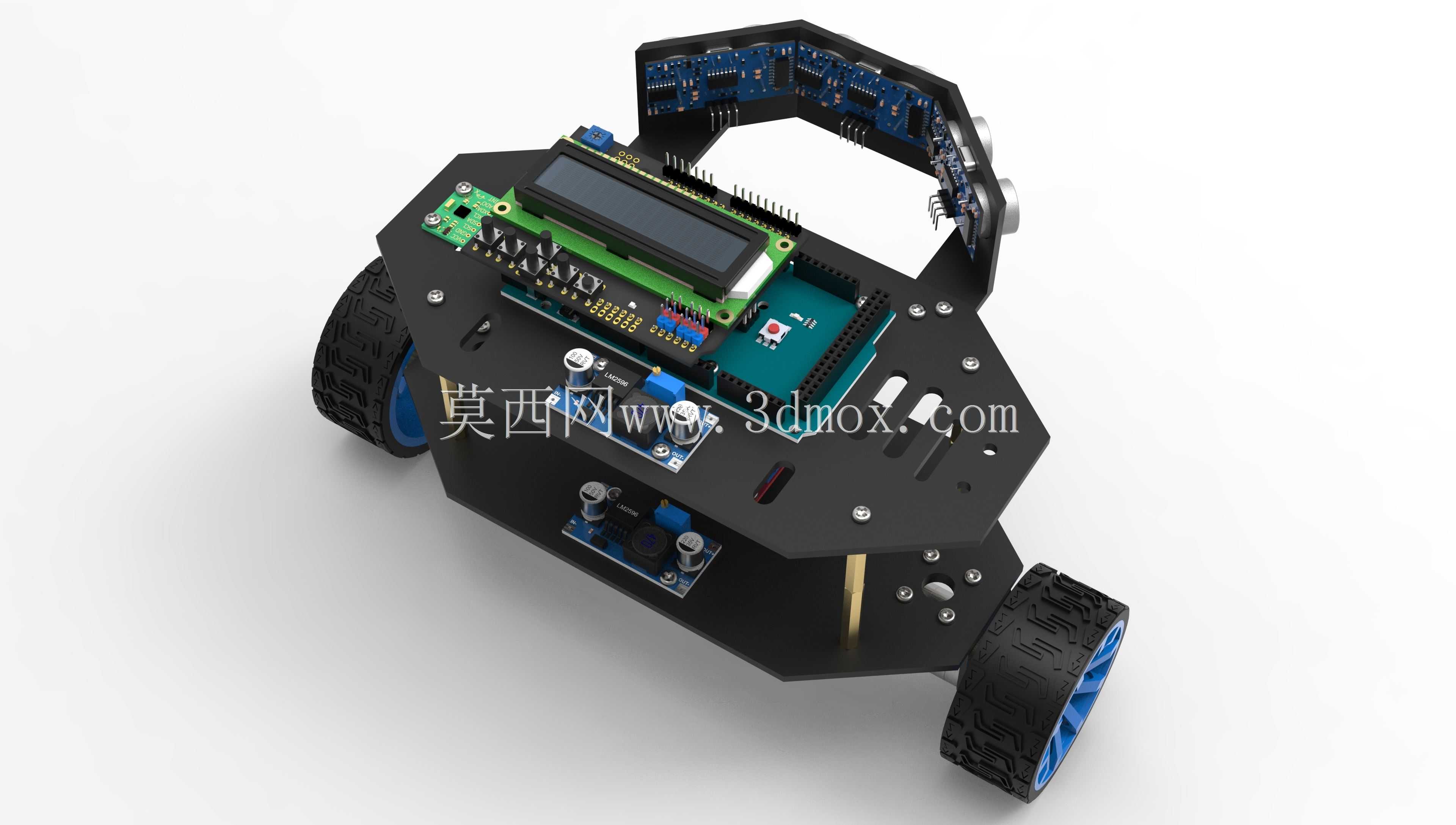
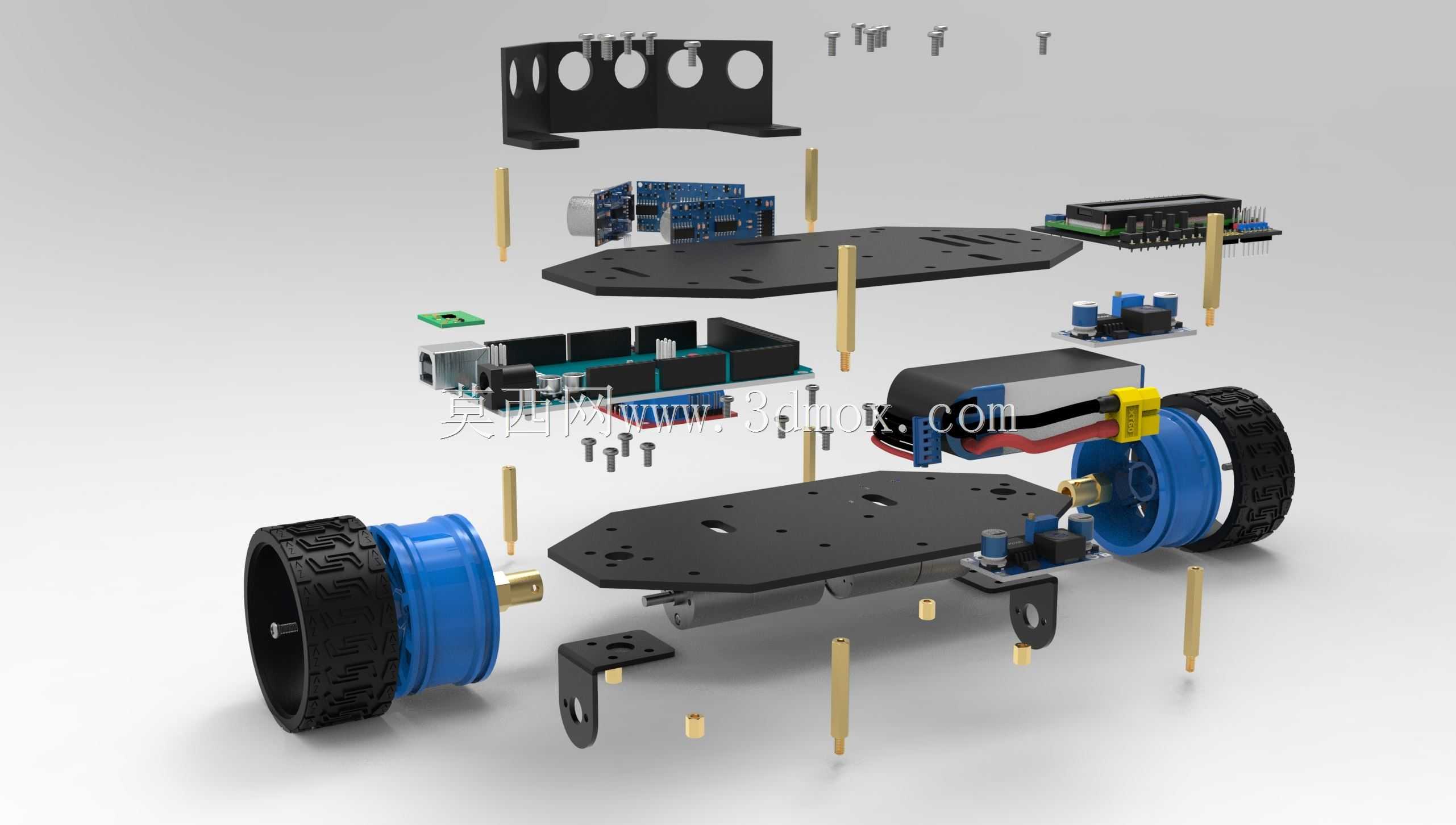
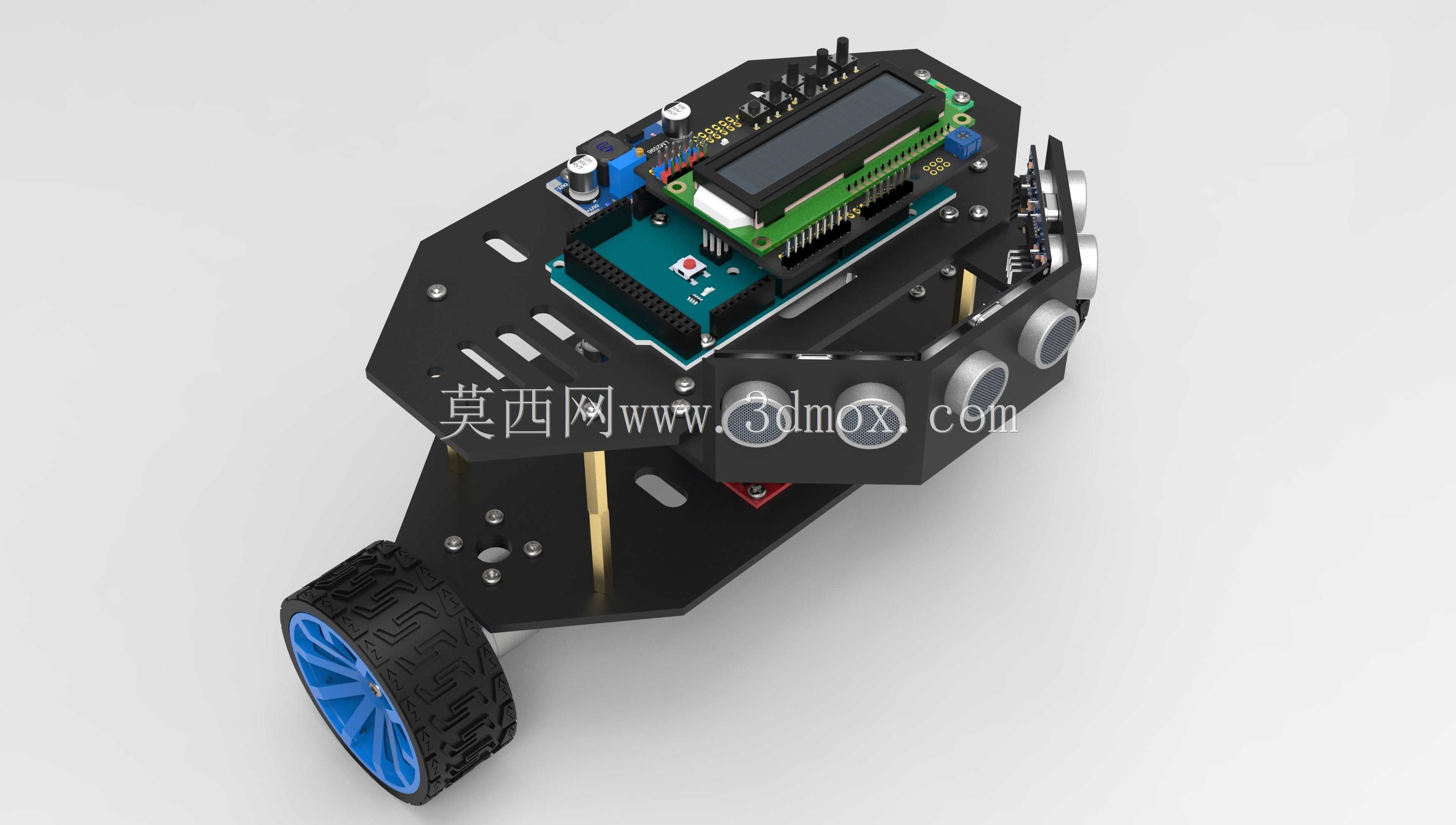
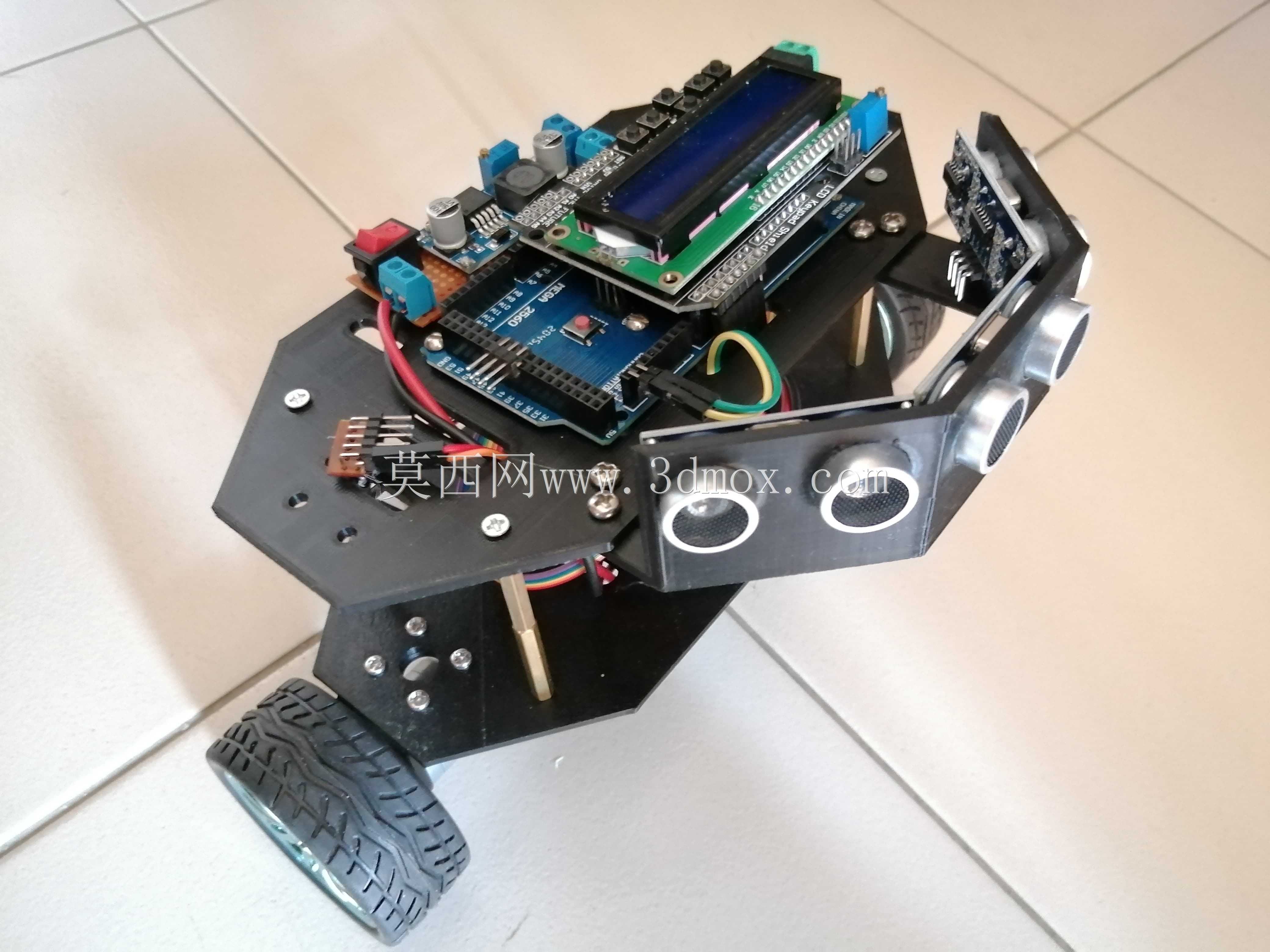

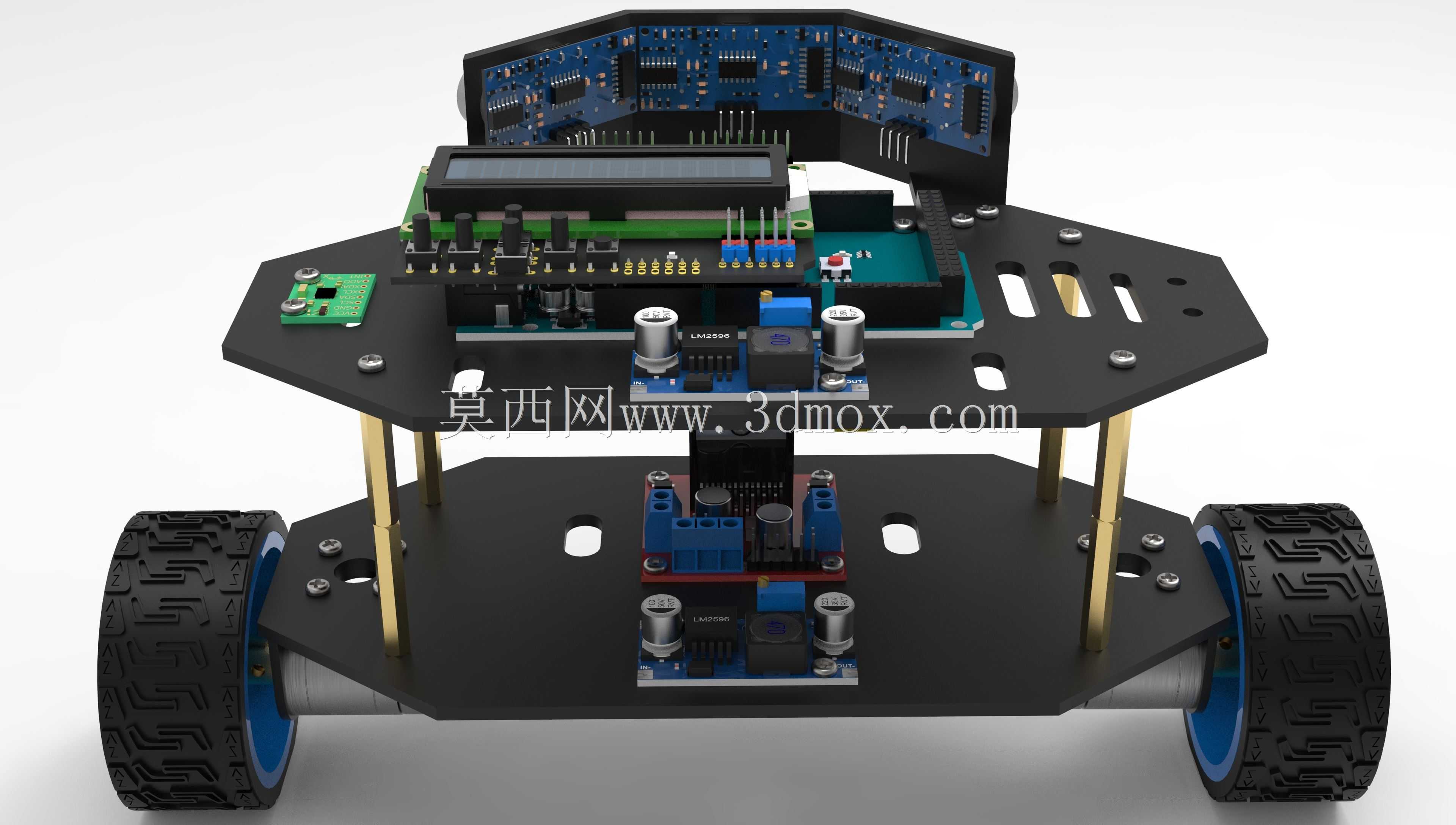
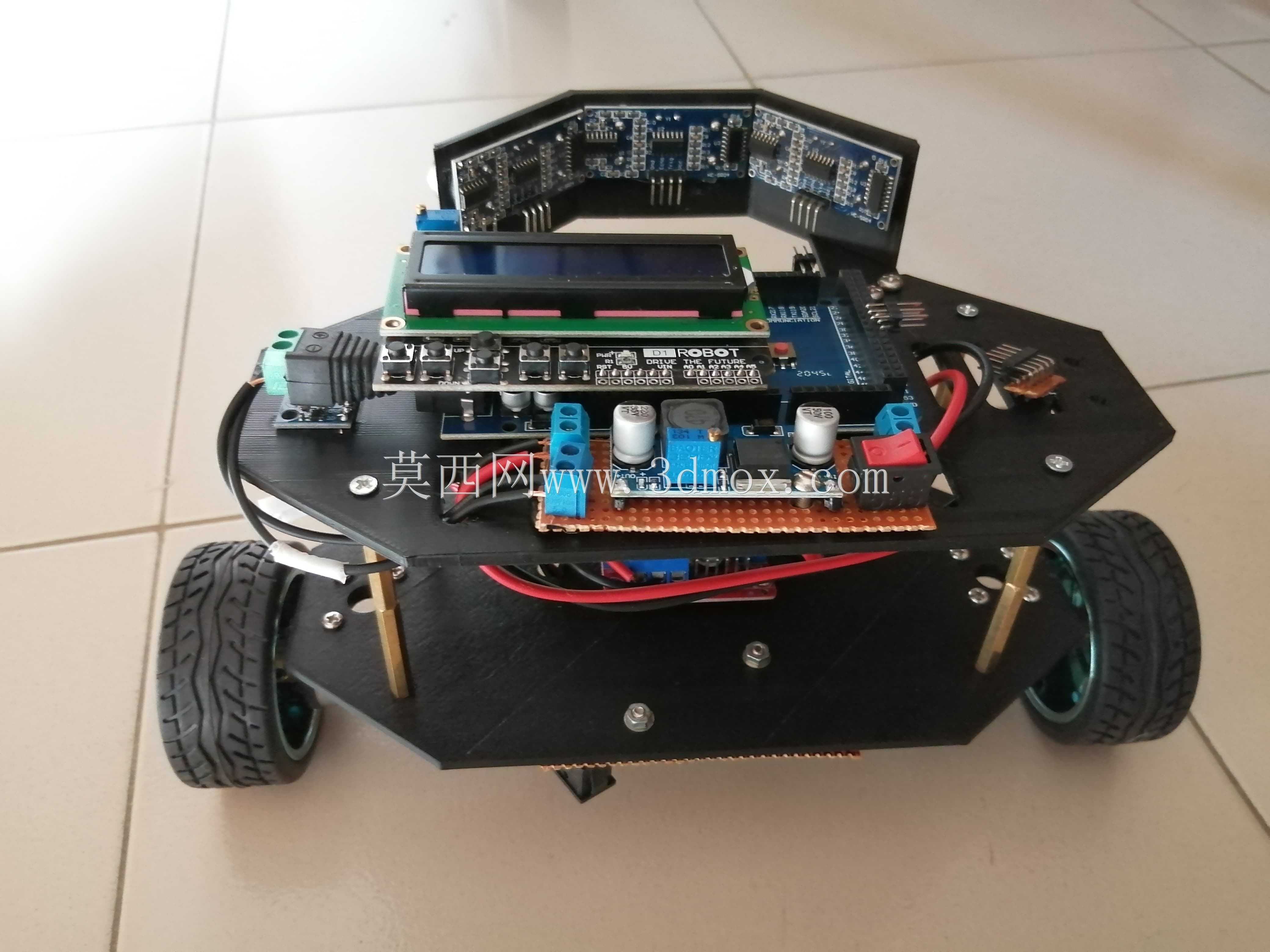


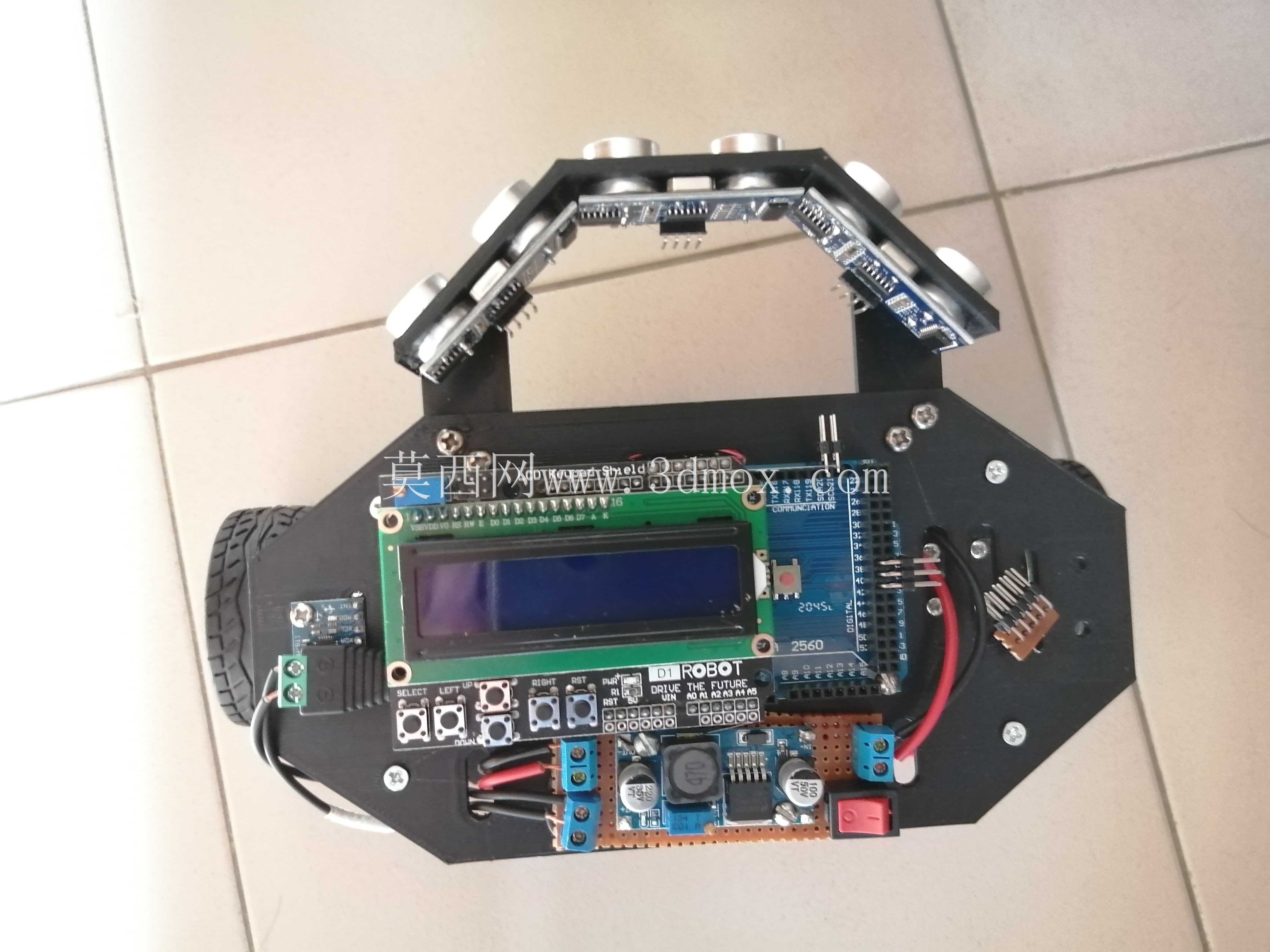
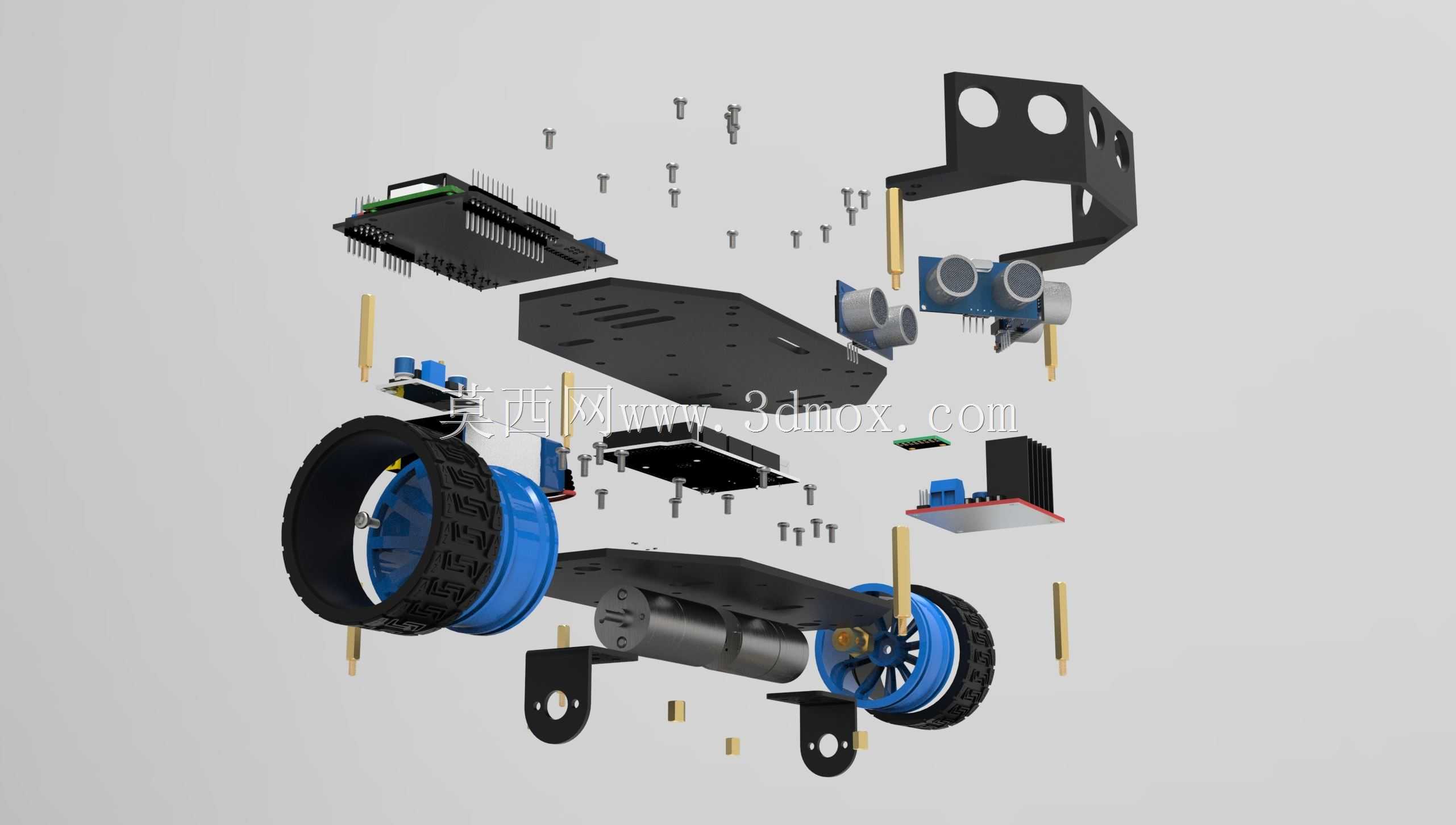

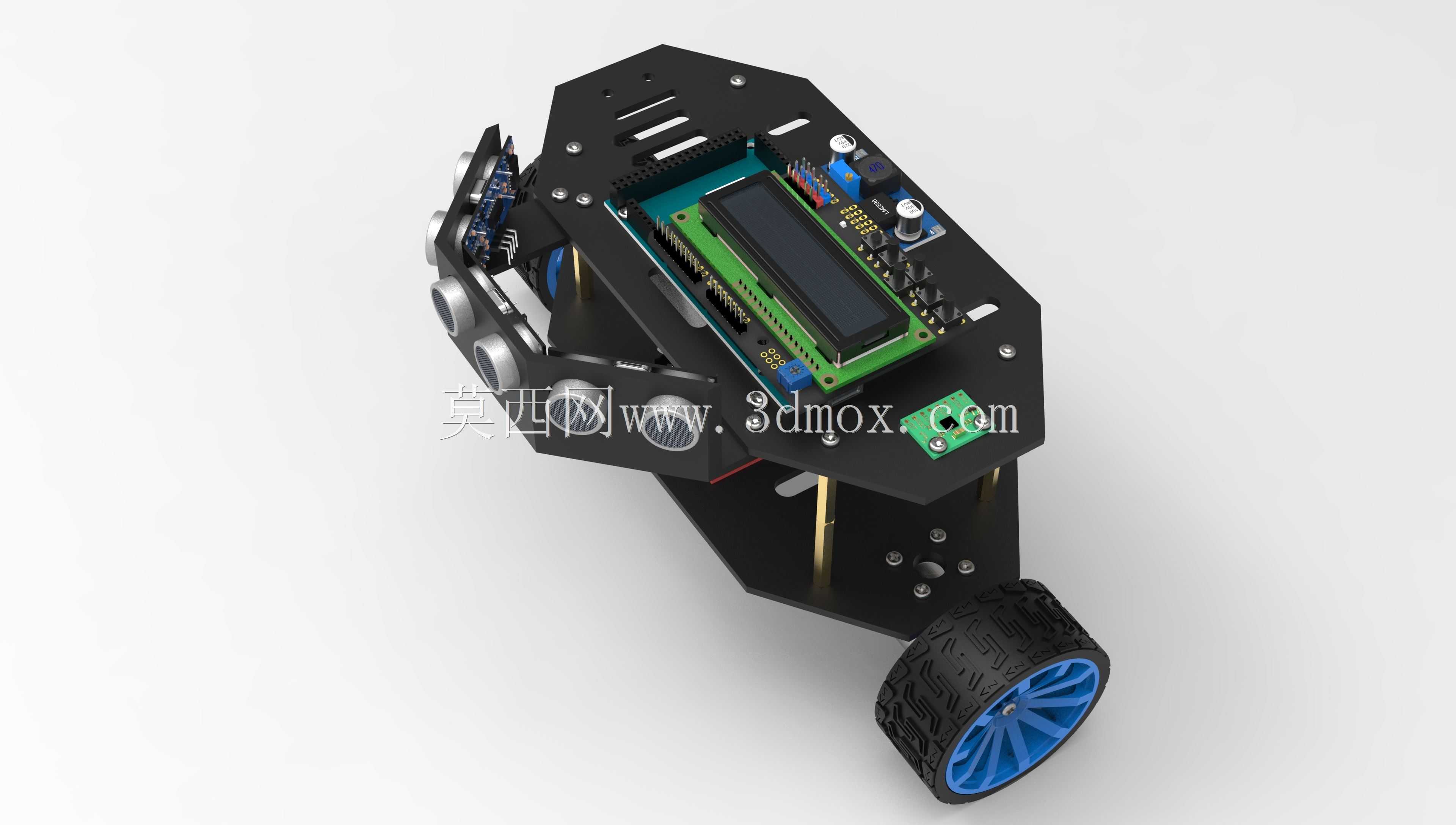

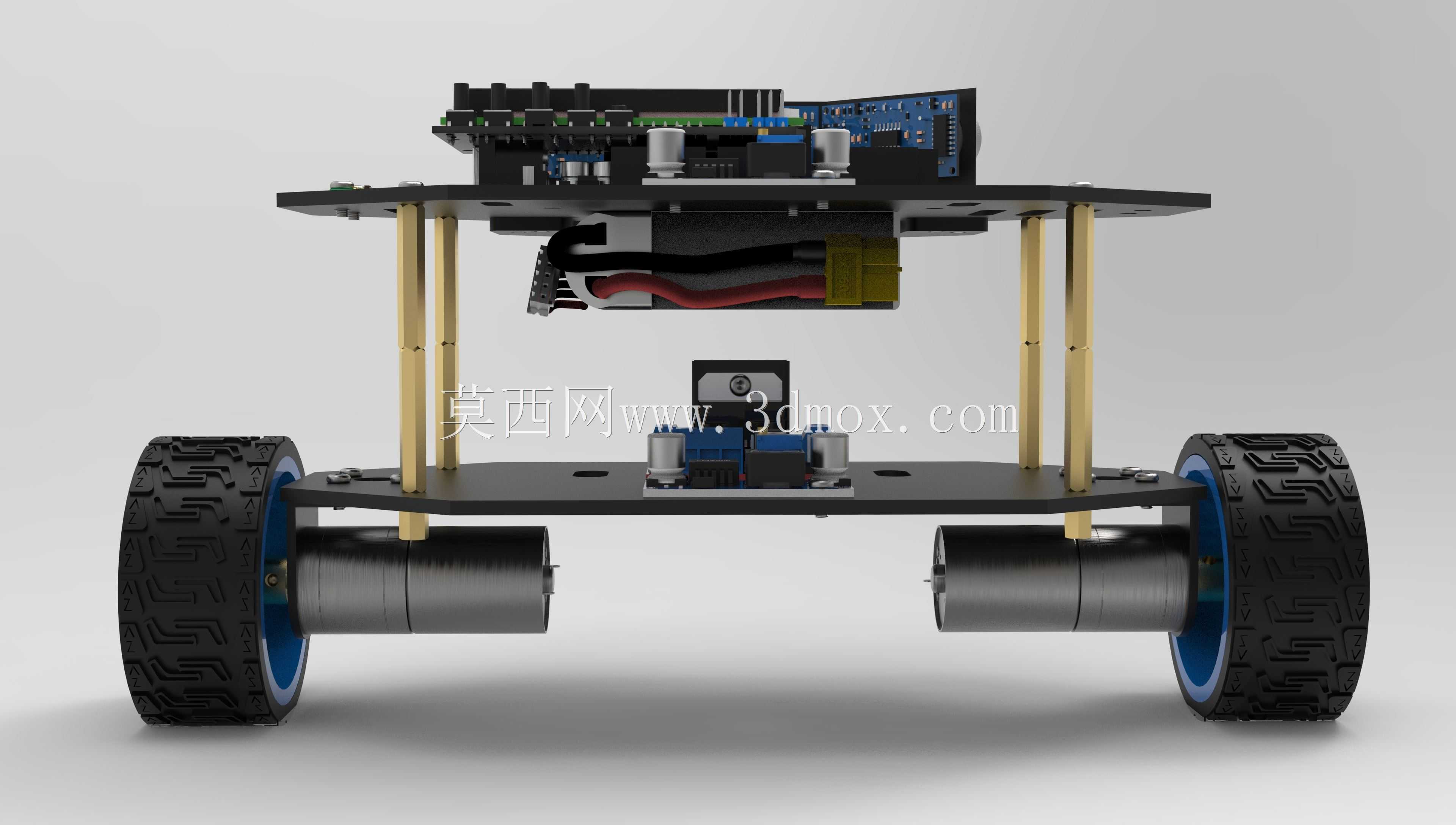
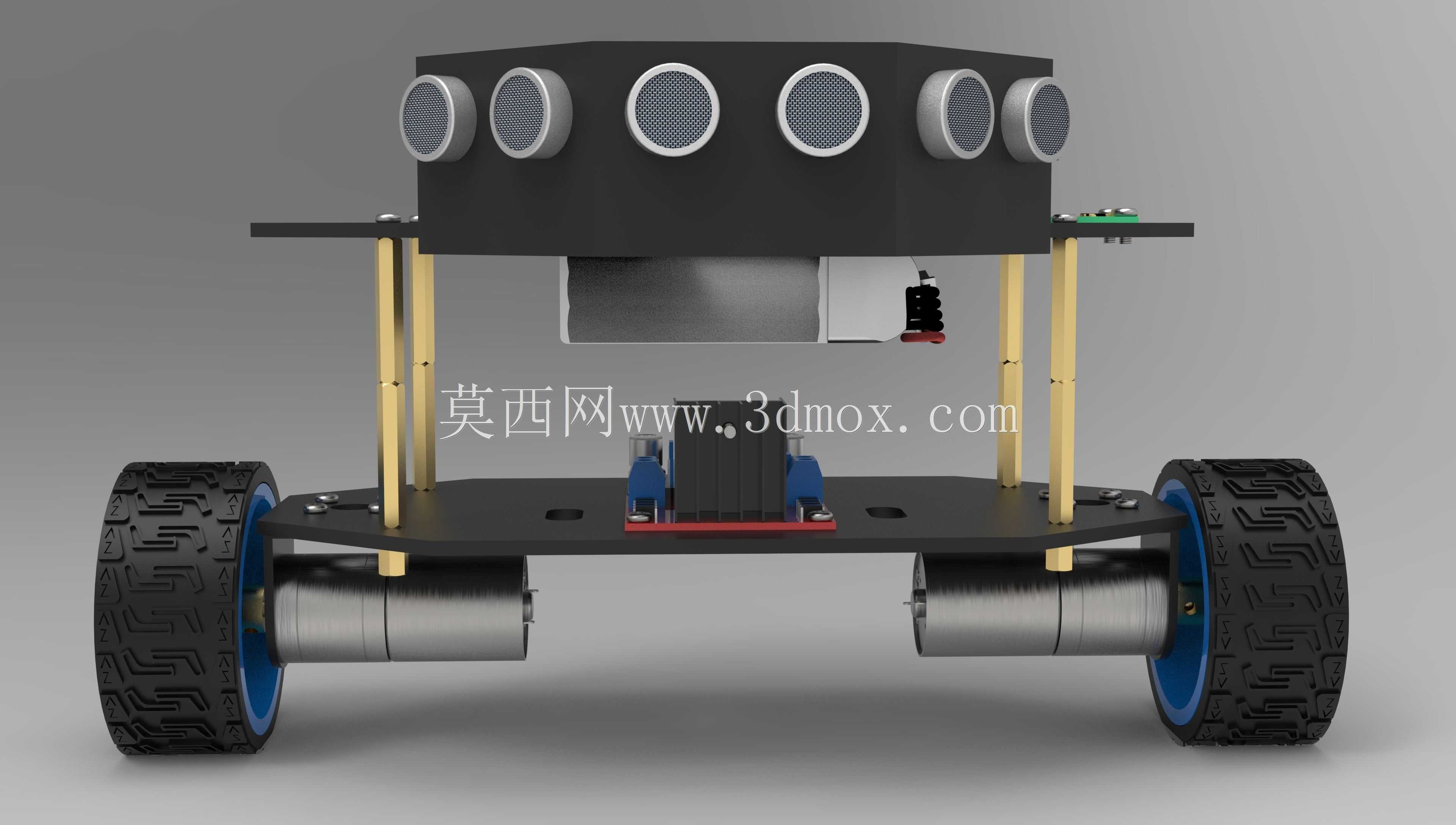
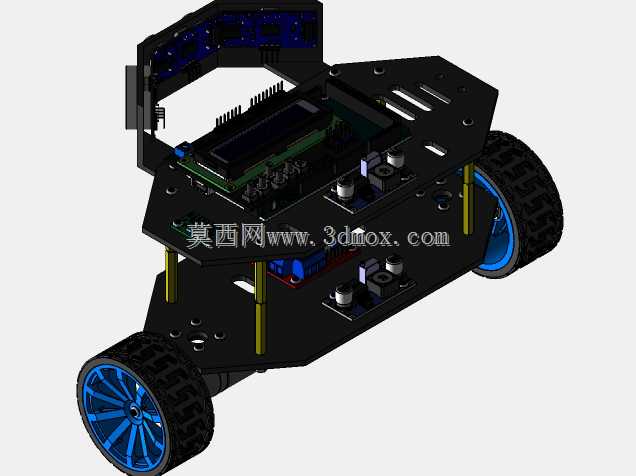





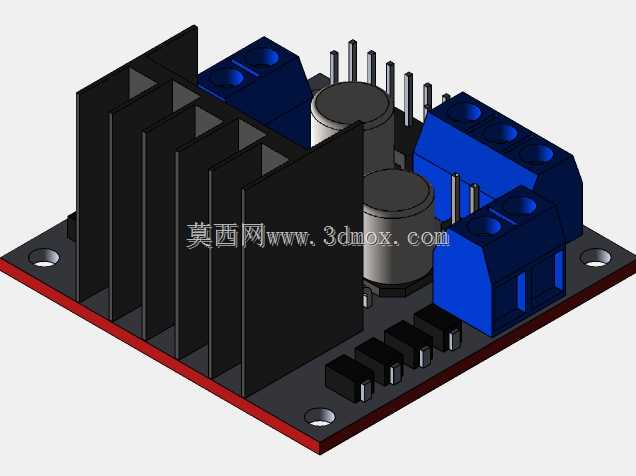











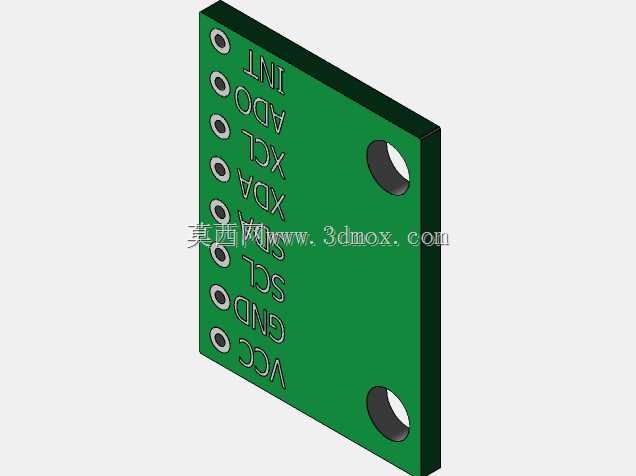

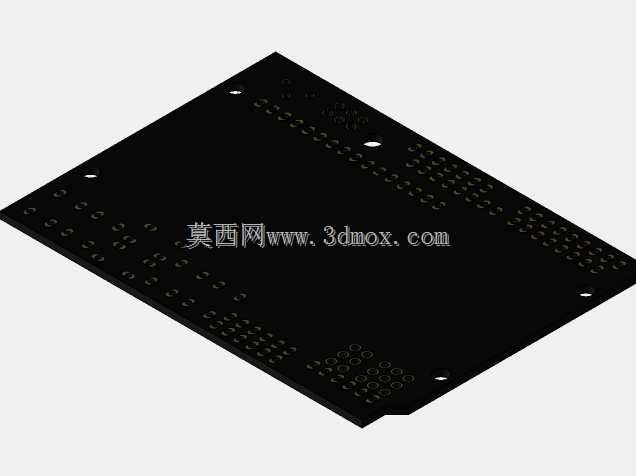










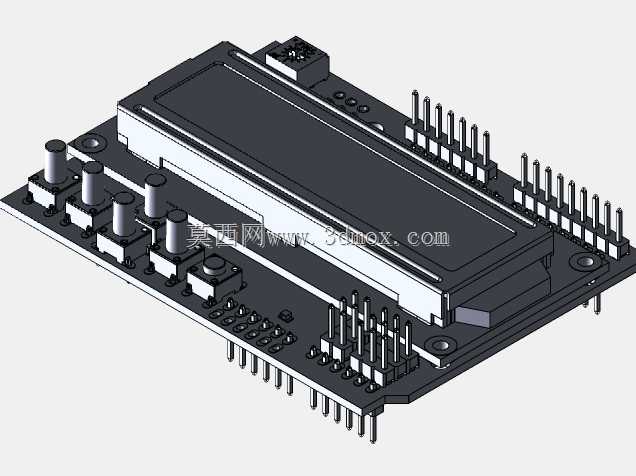













































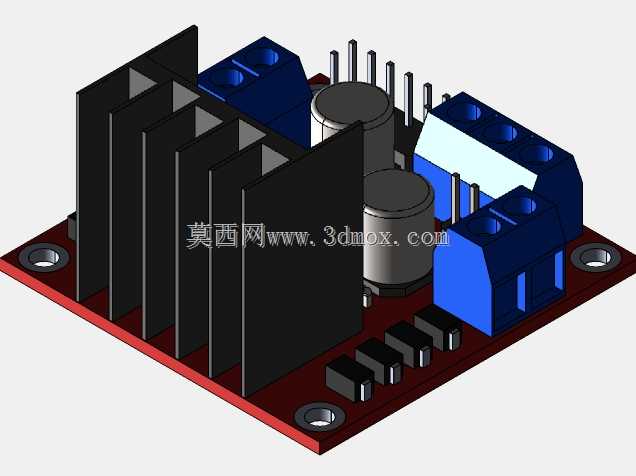




项目要求是设计和制造一个使用PID控制的避障、自平衡机器人。arduino微控制器板和mpu6050 IMU传感器用于传感和控制。使用了由锂电池供电的通用直流金属齿轮电机和L298电机驱动器。为了避障,在控制器板上增加了3个声纳传感器,用于距离反馈。针对PID应用校准了Kp、Ki和Kd的合适值。整个结构在solidworks中设计,在keyshot中渲染,然后进行3D打印。所有电气部件均取自Grabcad,用于组装。制造前设计的主要目的是中心的质量必须在中间,这对于平衡至关重要。在solidworks中设计,在keyshot中渲染。有关打开程序集文件的任何问题,请联系我。查看youtube链接了解分解视图动画和真实生活测试Github代码-https://github.com/Ariful17/Self-Balancing-Robot-with-PID-Control.git


- 模型大小 :151.24 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,STEP / IGES