PAROL6台式机械臂


























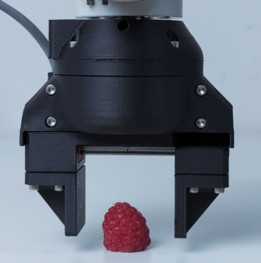
有关最新的组装手册和STL文件,请访问GITHUB:GITHUB:https://github.com/PCrnjak/PAROL6-Desktop-robot-armInterested在机器人里?查看我们的网站:https://source-robotics.com/PAROL6是6轴台式机械臂。这是一种机械臂,其设计方法是由机器人教育、小型自动化和从RnD到生产的实际需求驱动的。这是我之前制作的两个机械臂的权力下放和反馈的高潮,这两个都是非常成功的开源项目。PAROL6采用精密行星齿轮箱和皮带,精心放置,实现最佳重量分配。该设计是模块化的,可以轻松添加闭环驱动器。从软件方面来看,它使用自定义协议来实现行业标准的60-100 Hz循环时间。现代GUI的灵感来自工业和cobot接口,在这些接口中实现了所有标准的控制方式(解析速率、笛卡尔水平控制、关节水平控制、电机点动…)。它包括一个模拟器,可以在不需要物理机器人的情况下测试程序。PAROL6功能丰富,具有隔离I/O、CAN总线和兼容夹具。。。关于如何构建和如何使用PAROL6的所有信息都在GitHub上:https://github.com/PCrnjak/PAROL6-Desktop-robot-armJoin不和:https://discord.gg/prjUvjmGpZFollowyoutube上的项目:https://www.youtube.com/@source robotics在Instagram上关注该项目:https://www.instagram.com/5arcrnjak/If如果您有兴趣购买套件或组装机器人,请发送电子邮件至:Info@source-robotics.comSupport项目日期:https://www.patreon.com/PCrnjak


- 模型大小 :185.78 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Rendering