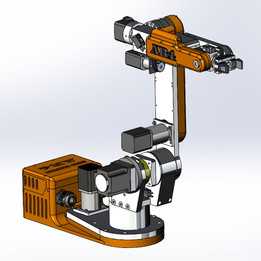
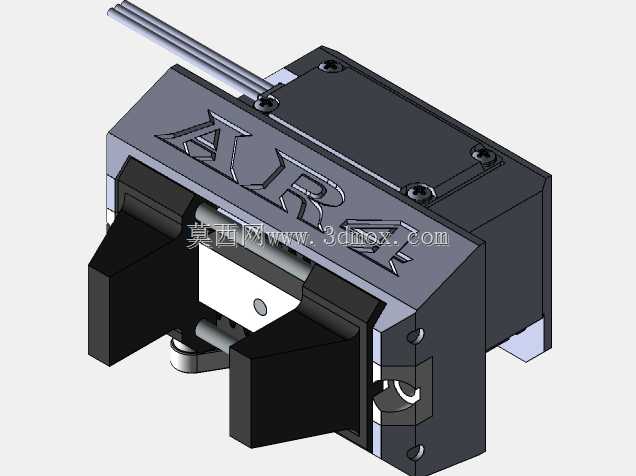
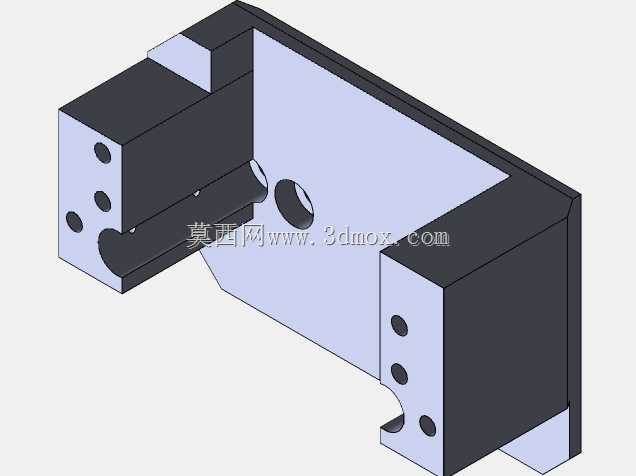
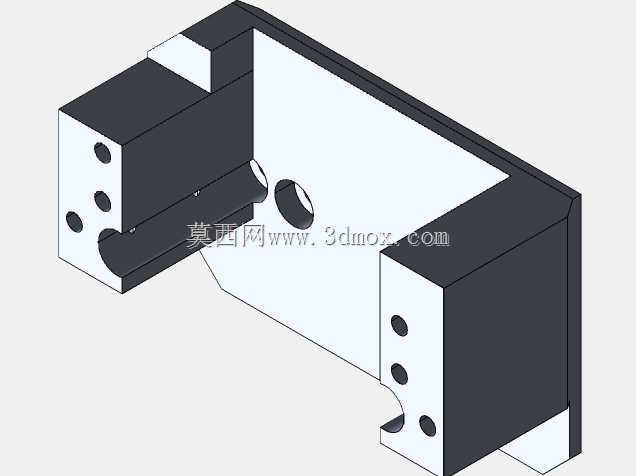
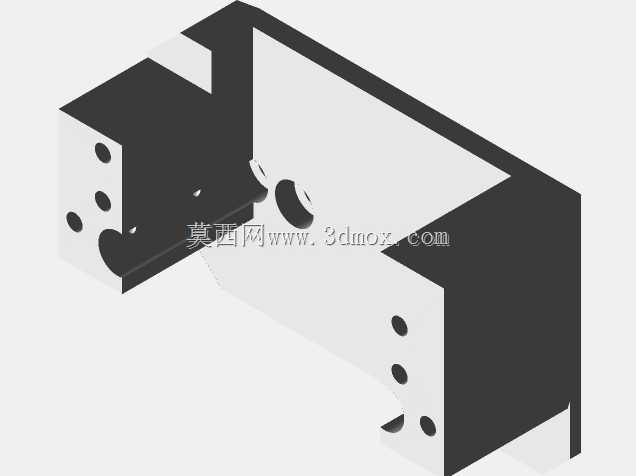
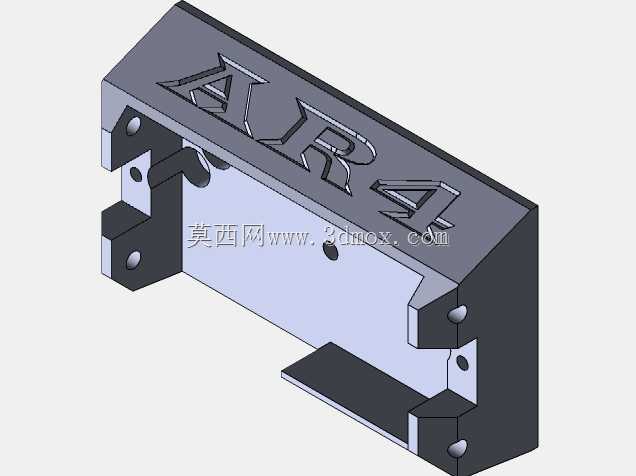
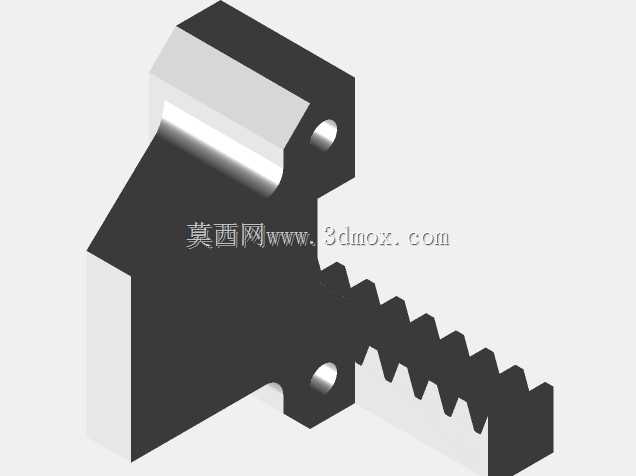
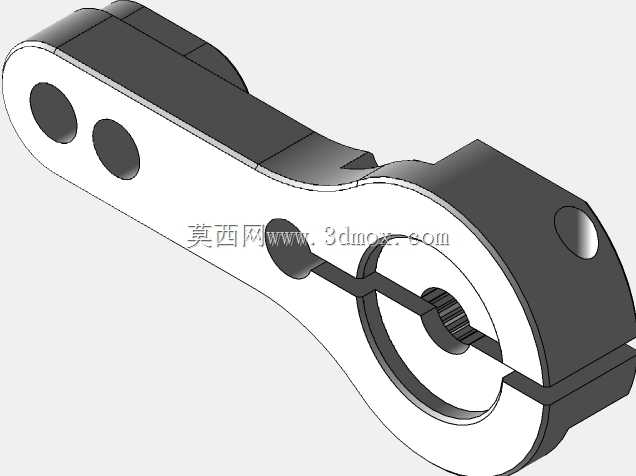
AR4机器人伺服夹持器
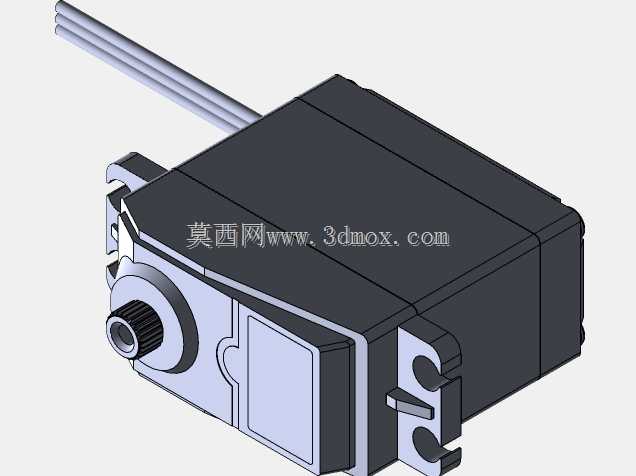
该伺服夹持器是为AR4机械臂设计的,但可用于任何机械手或拾取位置操作。它使用25公斤DS3225伺服,由3D打印部件制成。它由AR3或AR4控制器Arduino Nano板和5v电源控制。有关AR3或AR4机器人的更多信息,请访问https://www.anninrobotics.com/


- 模型大小 :13.6 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,STEP / IGES,STL









该伺服夹持器是为AR4机械臂设计的,但可用于任何机械手或拾取位置操作。它使用25公斤DS3225伺服,由3D打印部件制成。它由AR3或AR4控制器Arduino Nano板和5v电源控制。有关AR3或AR4机器人的更多信息,请访问https://www.anninrobotics.com/