Aboat_project_simulation_model




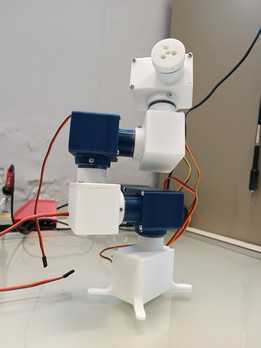
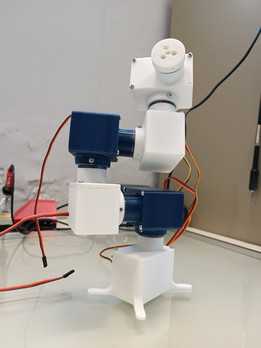
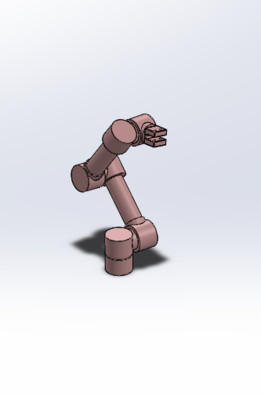
该模态是作为Abo Akademi的Aboat项目的一部分开发的,其目标是用于演示和模拟,它的设计很少有细节,因为它是用于ros/凉亭应用的信息:激光雷达关节=“lidar_joint”第一个电机关节=“first_motor_joint”第二个电机关节=“second_motor_joint”base_link=“base_link”*如果base_move与ros一起使用,则将中间板命名为base-link


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STL,Fusion 360,Rendering