Coqui桶

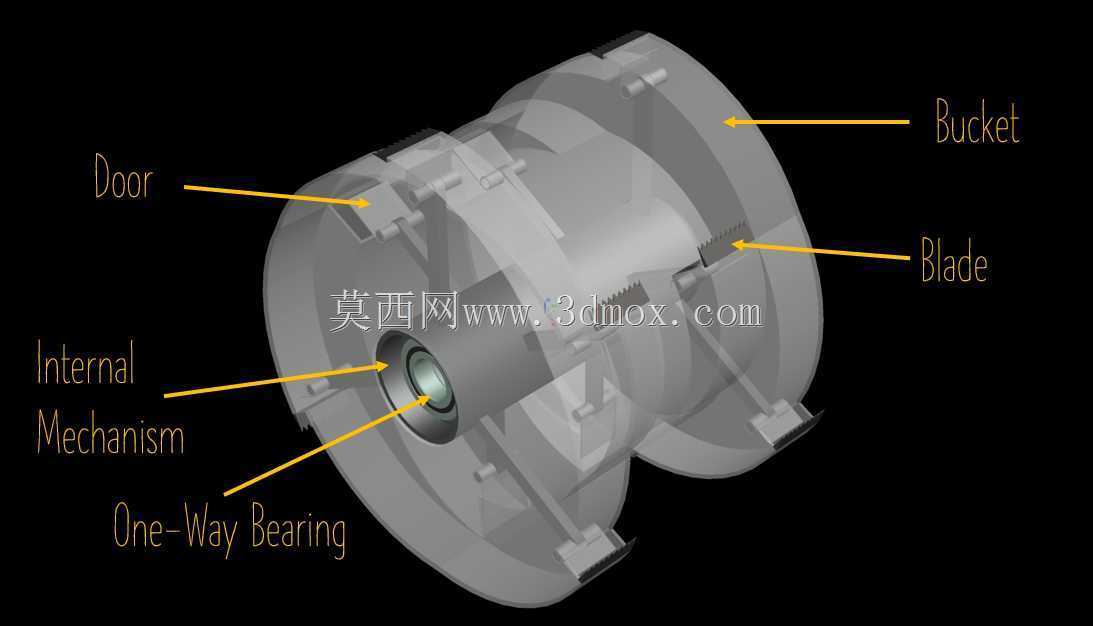

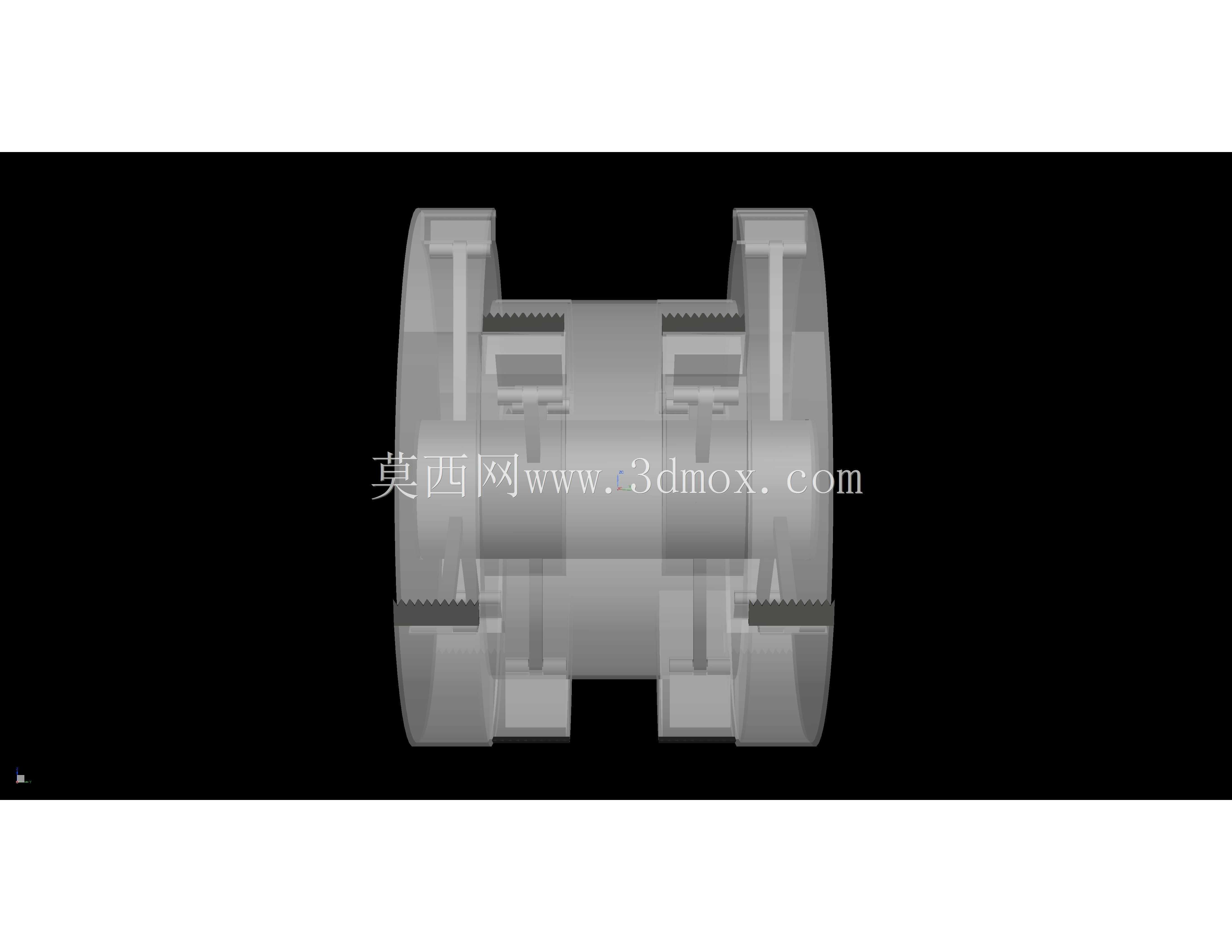
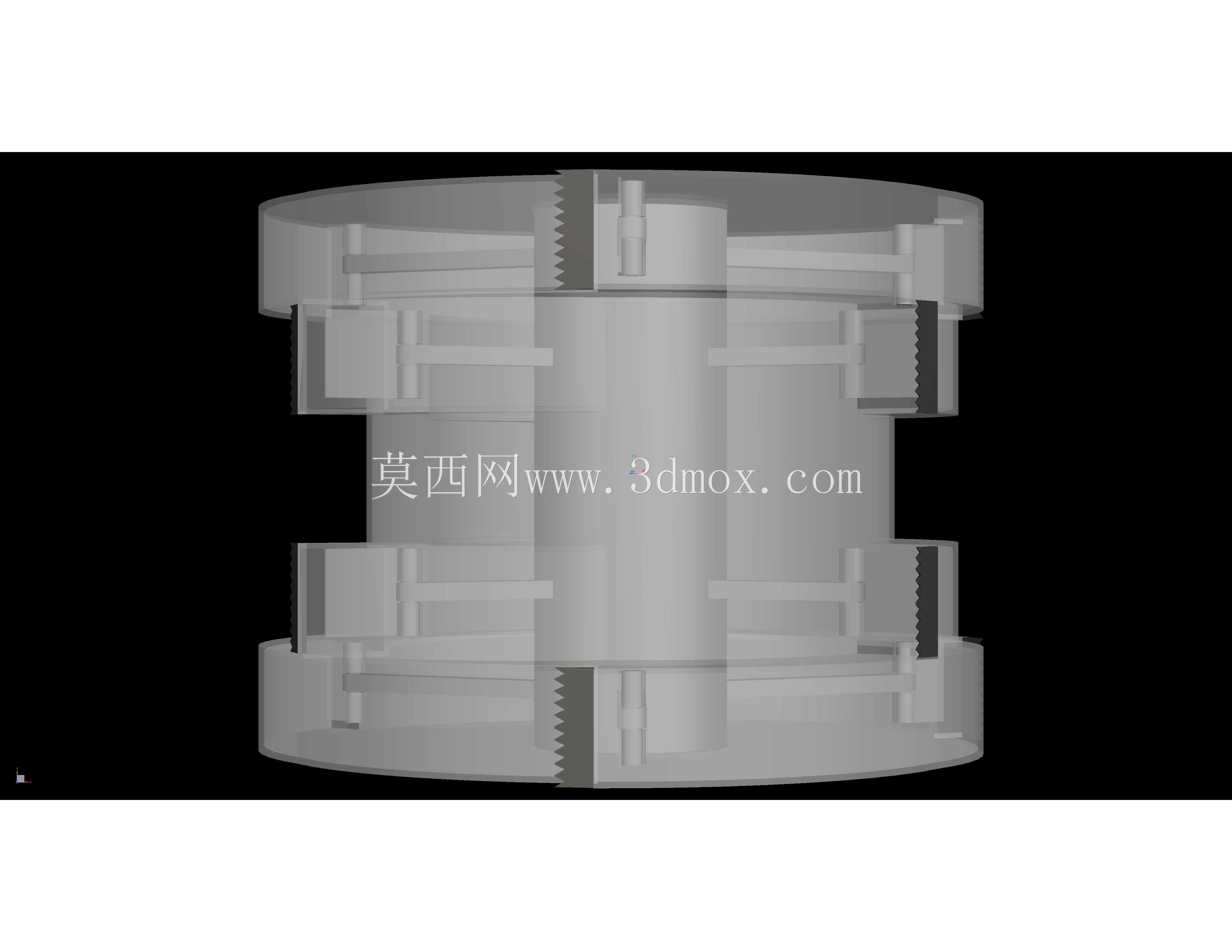
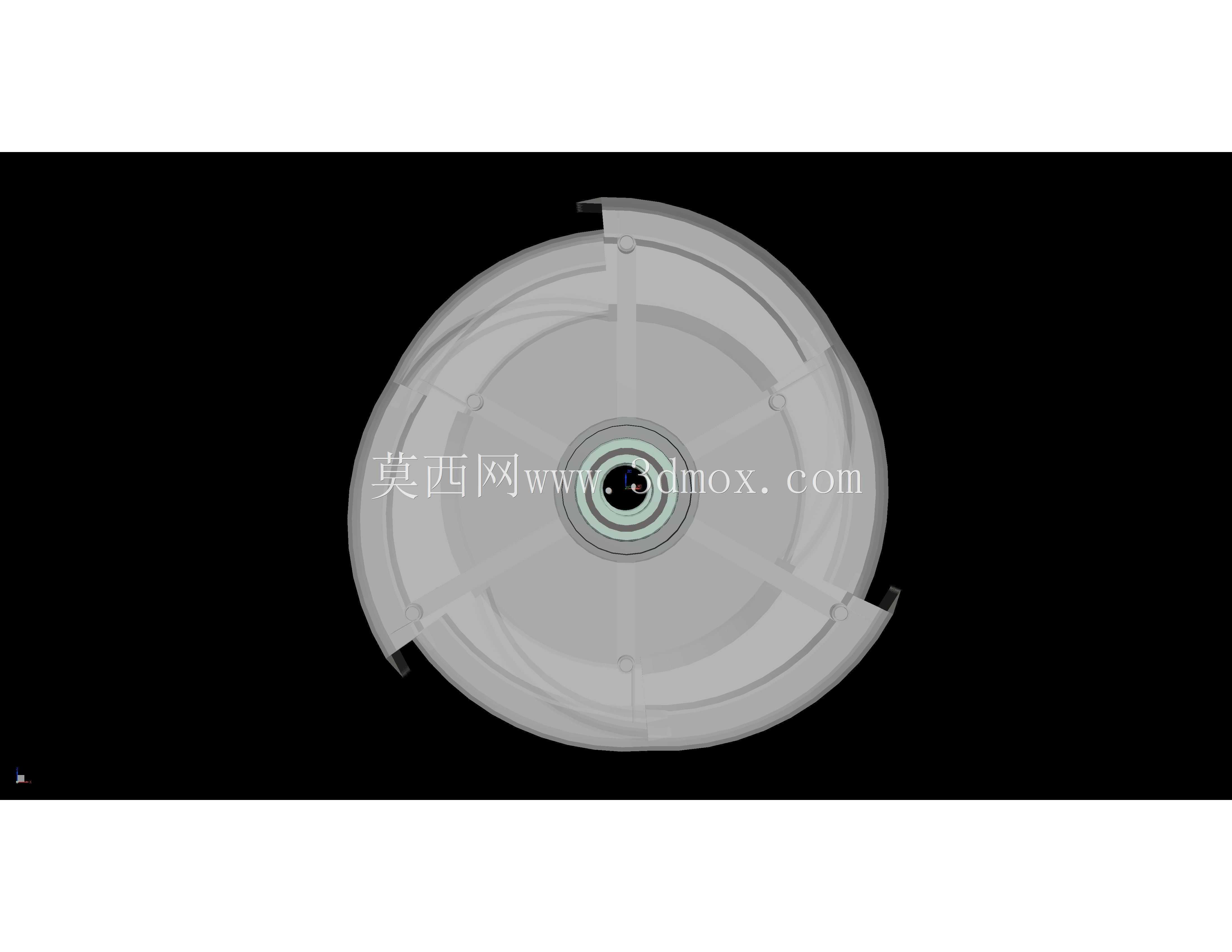
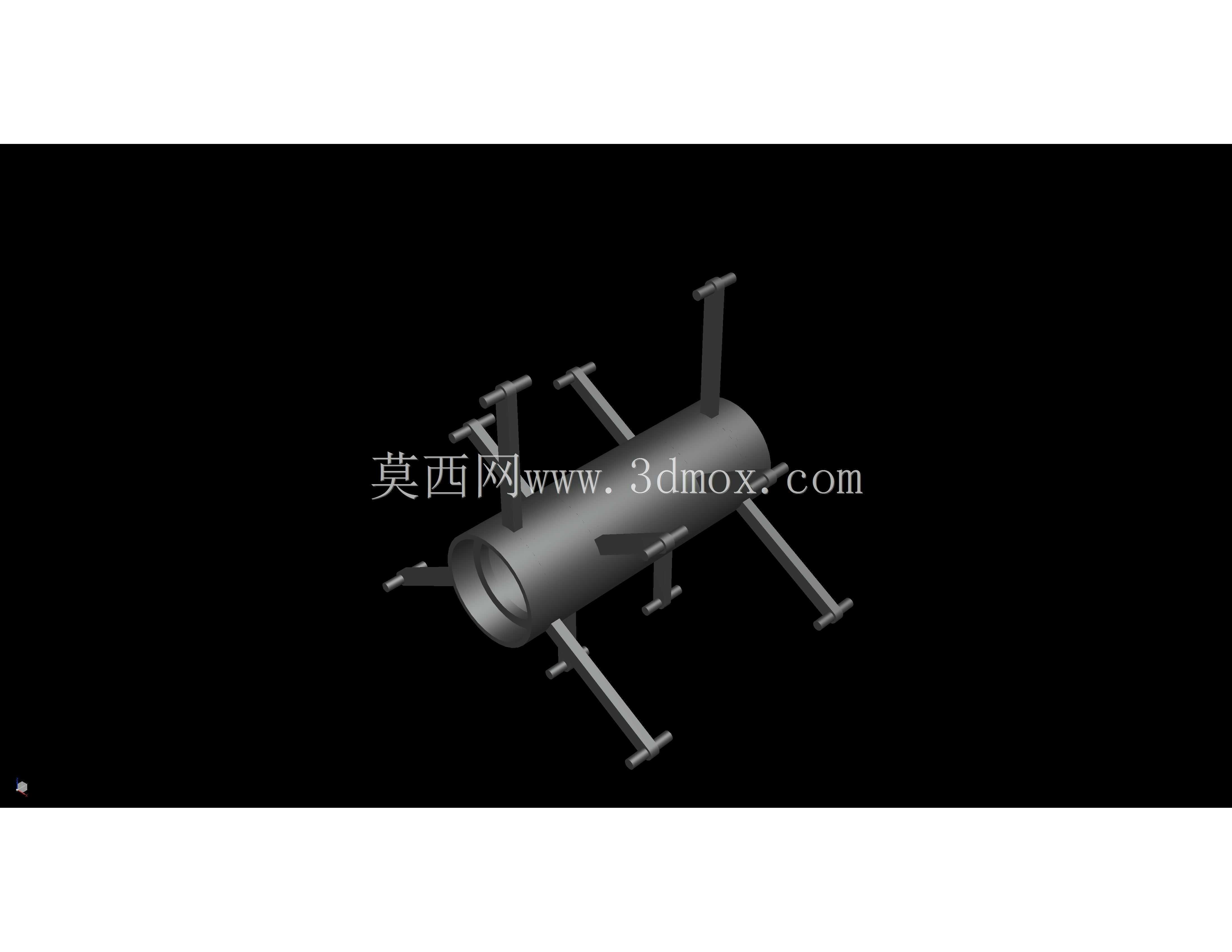
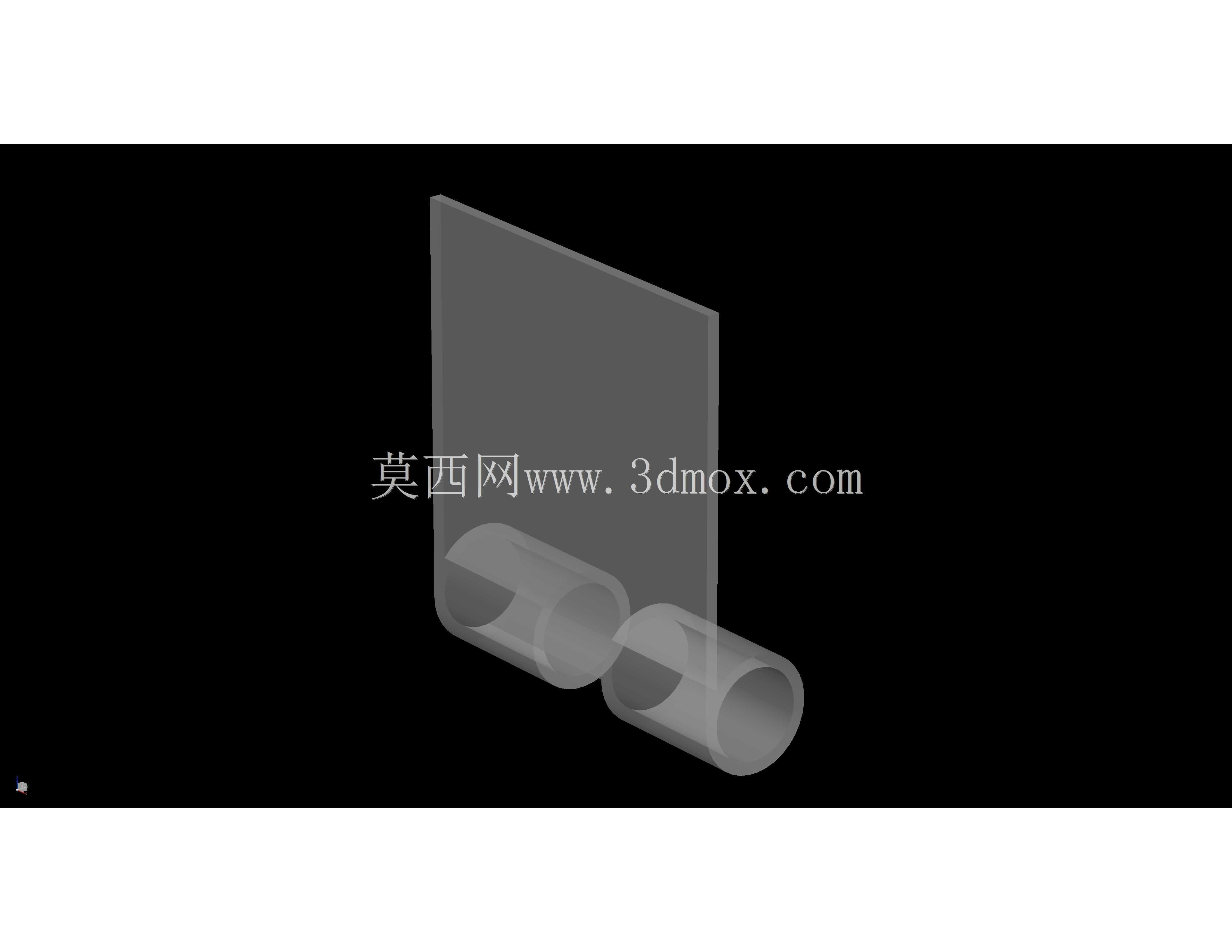
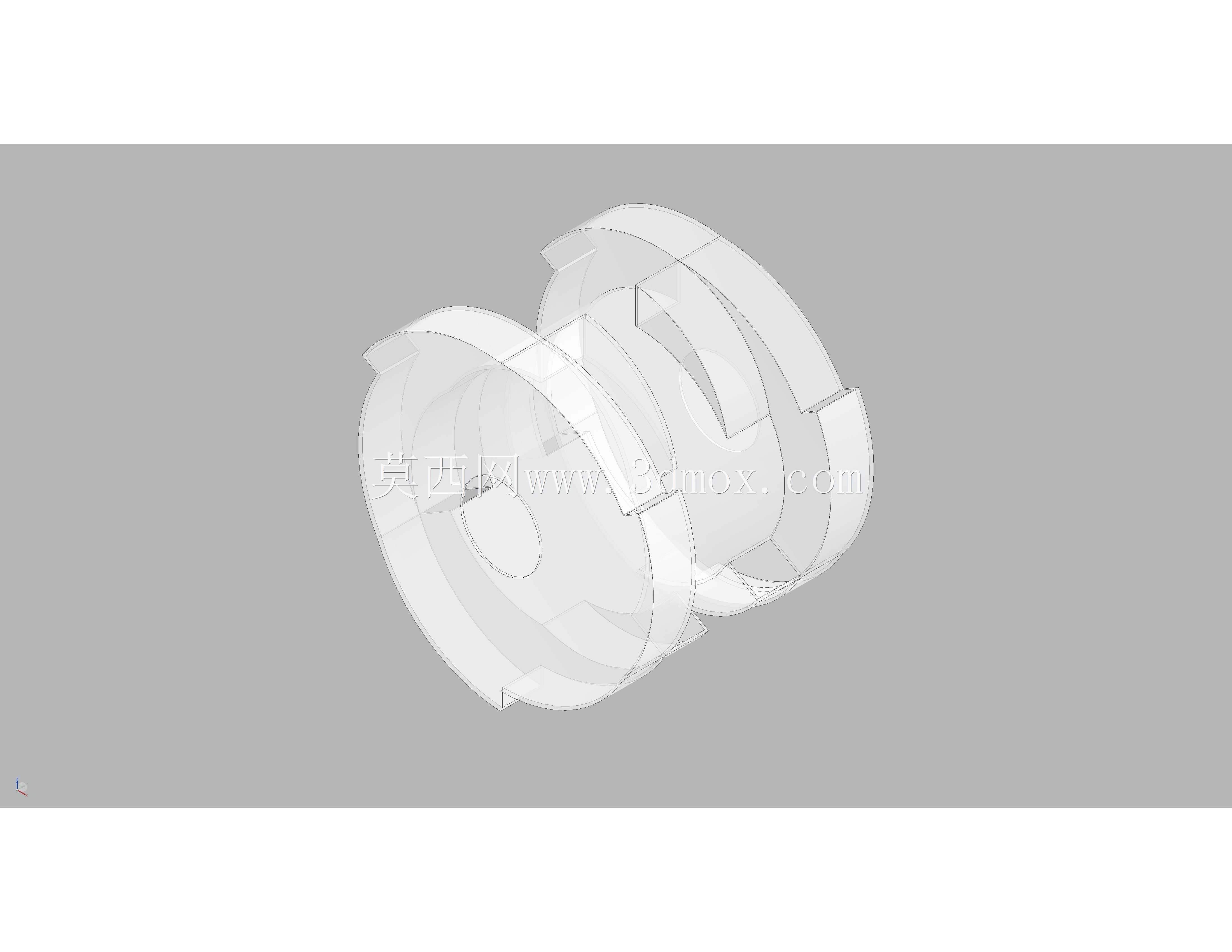
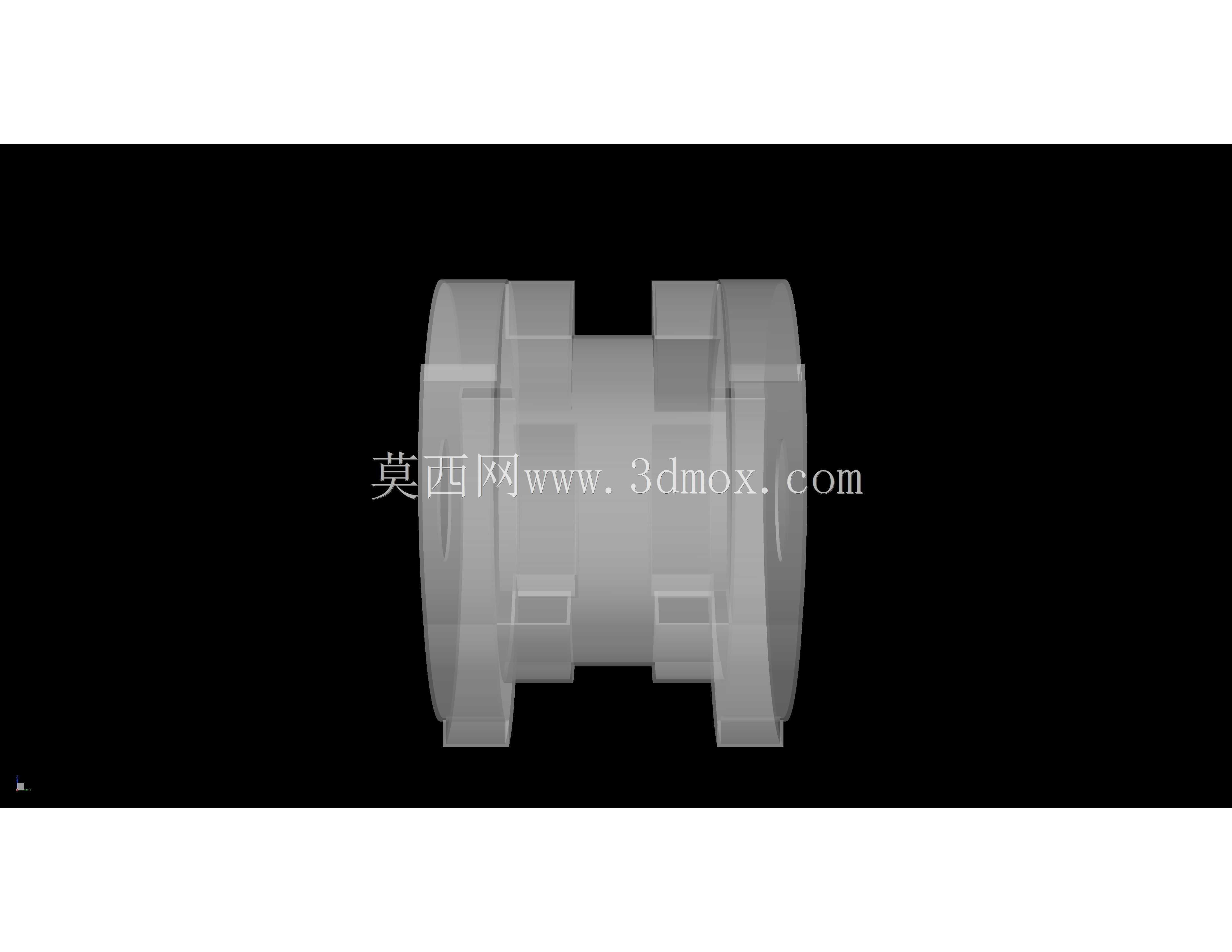
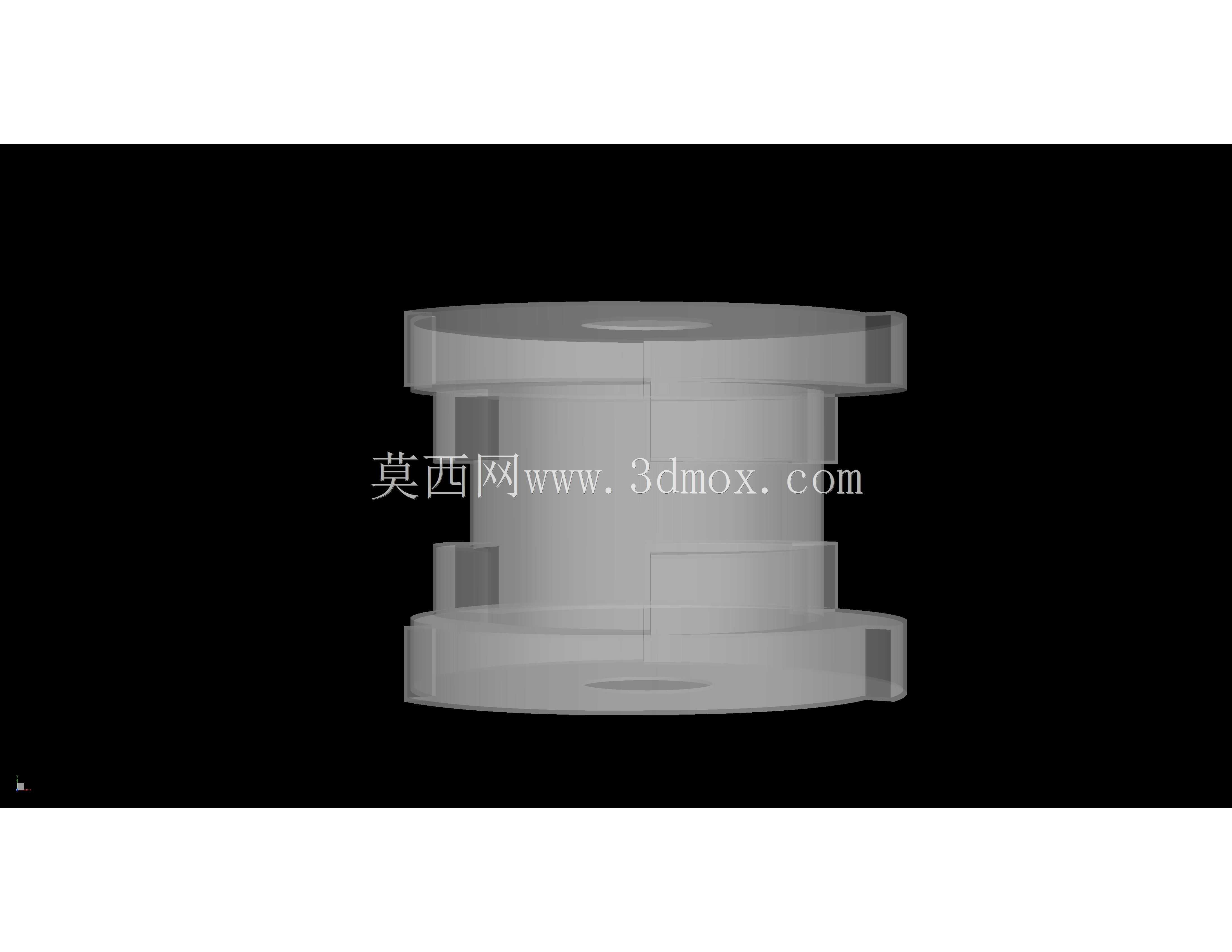

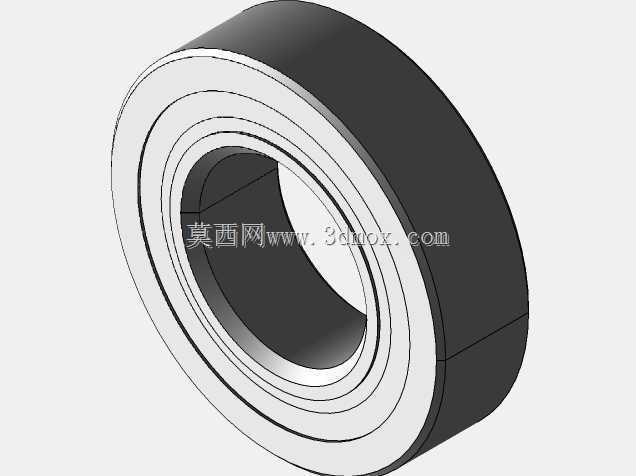

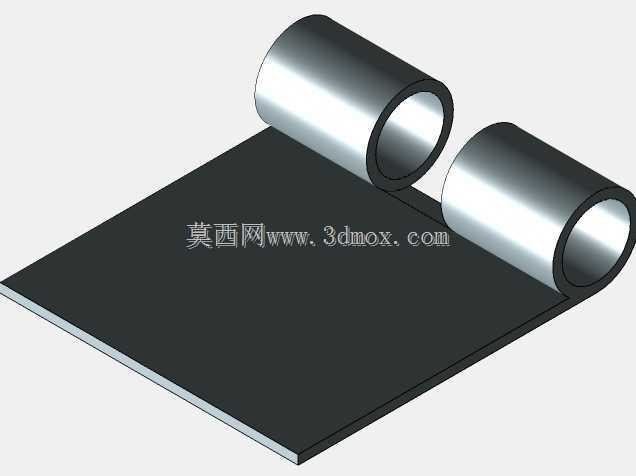
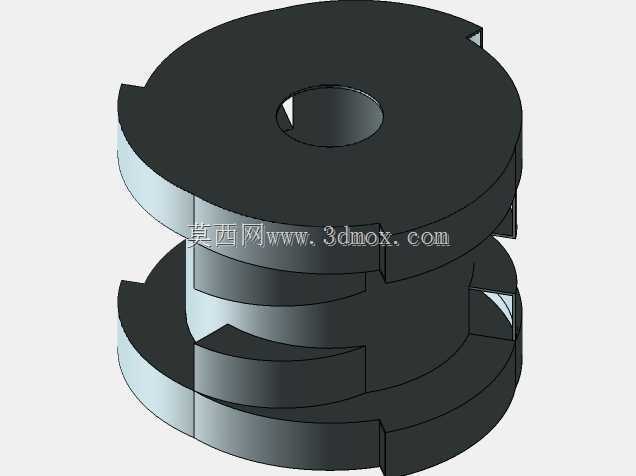


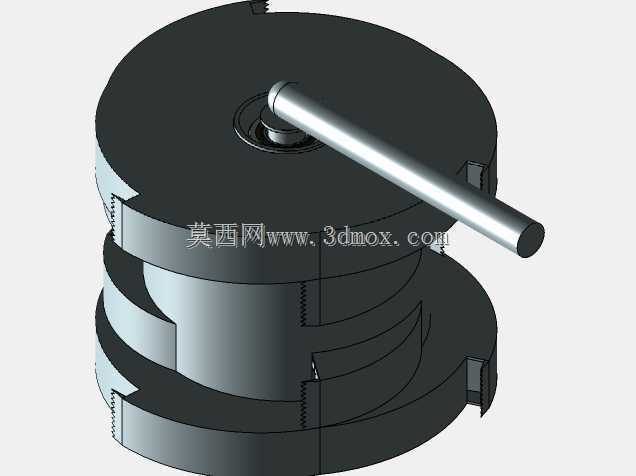
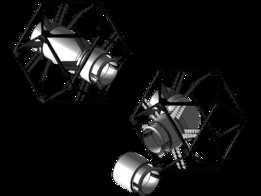
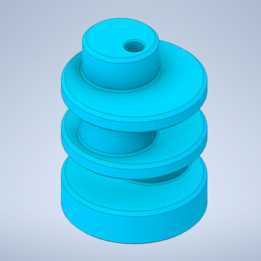
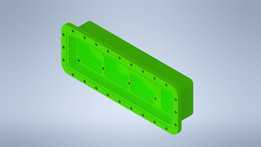
当前Rassor铲斗的文献表明,其装载和卸载机制对于机器人来说是有效的。这就是为什么我决定保留这个新模型的轮换基础,但要改变输入水平和保留机制。该模型提供了一种内部机制,允许在加载时通过“打开门”输入风化层,在该方向上不会产生任何阻力。另一方面,一旦铲子没有与土壤接触,这个“门”就会被拉到其原始的笔直位置:关闭铲子的入口,不让风化层逃逸。“门”不能朝相反的方向打开。这些门安装在一个内部轴上,该轴由安装在主拉瑟轴上的两个单向轴承支撑。装载时,内部机构与铲斗一起移动。卸载时,单向轴承使内部机构“浮动”,门由旋转铲斗的内表面打开。这使得勺子的开口畅通,以便风化层出来。该模型有两个直径:侧面直径较大,中心直径较小。目的是限制风化层在同一地方的分组。侧面的勺子为直径最大为2.5厘米的岩石提供入口,而中心的勺子为5厘米直径的岩石提供出口。如上所述,最大直径为450毫米,铲斗长度为310毫米,考虑到内部机构的最大容积约为27升。这使得最小17.5升的填充率约为65%。分别用于内部机构、门、桶或外壳和叶片的Al 5086、聚乙烯、丙烯酸和Ti-6Al-4V材料。将所有质量相加,总重量为5.5公斤。在接近要求的情况下,可以通过改变内部机构的一些测量值来减轻整体重量。尽管如此,仅铲斗质量就有2.6公斤。对于设计,我使用了西门子NX 12,除了我从麦克马斯特-卡尔公司获得的单向轴承外,所有零件都是原始设计
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STL,Rendering,PTC Creo Elements,Other