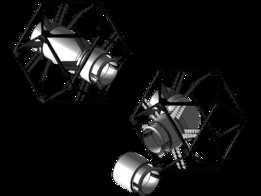
Ae?tes v2

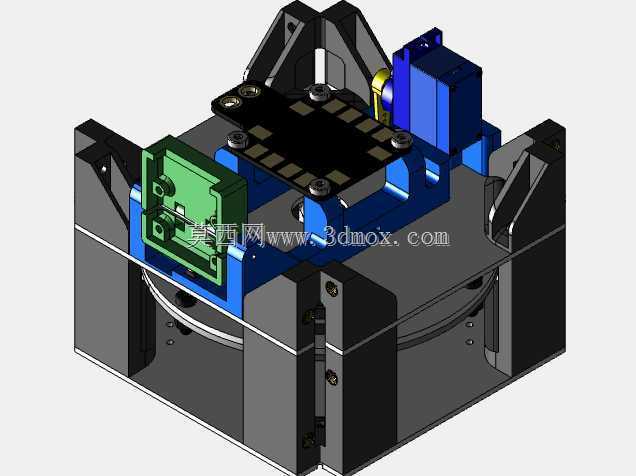

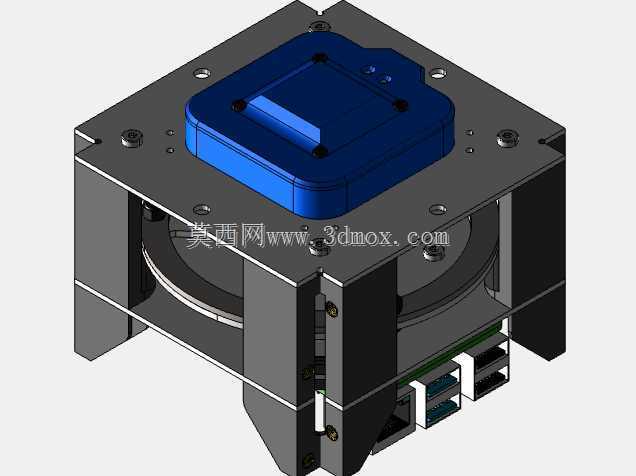
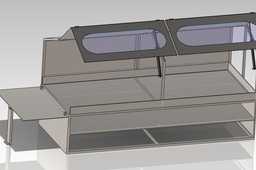
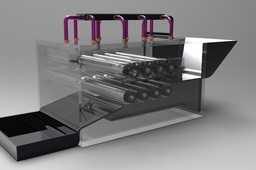
高空自主气球有效载荷(HAABP)设计用于追踪2024年4月8日的日食。利用反作用轮控制偏航方向,并利用微伺服控制相机俯仰。由DREAMS实验室资助的亚利桑那州立大学高级设计顶点EEE 488/489。该系统旨在使用安装在Raspberry Pi 4上的ROS2,与mRo PixRacer Pro飞行控制器通信。外围设备包括用于位置精度和航向的mRo GPS模块、配电板、Raspberry Pi Camera v2、SiK Radio(915 MHz)和微伺服(9g)。电机是顺时针DJI 2312s,ESC也是DJI。全部采用4S LiPo电池供电。该组件的更新版本仍在设计中,它将包含更好/更容易的组装、更强的气象气球顶部连接、更少的紧固件和更好的相机运动范围。目标重量为3磅(1390克)或更小,预期高度为100000英尺(30480米)。完整装配是“Full_assembly.STEP”文件有效载荷层次结构:Full_Assemble。步骤|_上部组装。步骤|_中间组装。STEP|_下料_组装。STEP根据有效载荷中的材料类型,将所有文件放在相应的文件夹中。为子部件列出的文件和对象太多。使用的其他设计(未创建):Raspberry Pi 4-https://grabcad.com/library/raspberry-pi-4-5RaspberryPi Camera v3-Raspberry Pi相机模块v3SiK遥测无线电v3-SiK遥测无线电V3M2热套插入件-https://www.mcmaster.com/94459A110/M212mm内六角螺钉https://www.mcmaster.com/91290A148/M310mm F/F黄铜支座https://www.mcmaster.com/94868A166/M36毫米M/F铝制支架https://www.mcmaster.com/98952A104/M3热定型插件-https://www.mcmaster.com/94459a130/M36mm低剖面内六角螺钉https://www.mcmaster.com/93070A064/M310mm低剖面内六角螺钉https://www.mcmaster.com/93070A067/M3尼龙插入锁紧螺母-https://www.mcmaster.com/90576A102/M6尼龙插入锁紧螺母-https://www.mcmaster.com/90576A814/p
- 上一篇:雅科夫列夫雅克-19
- 下一篇:ZWO M42-CS ASI适配器

- 全部评论(0)

- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES