风化层提取器再生
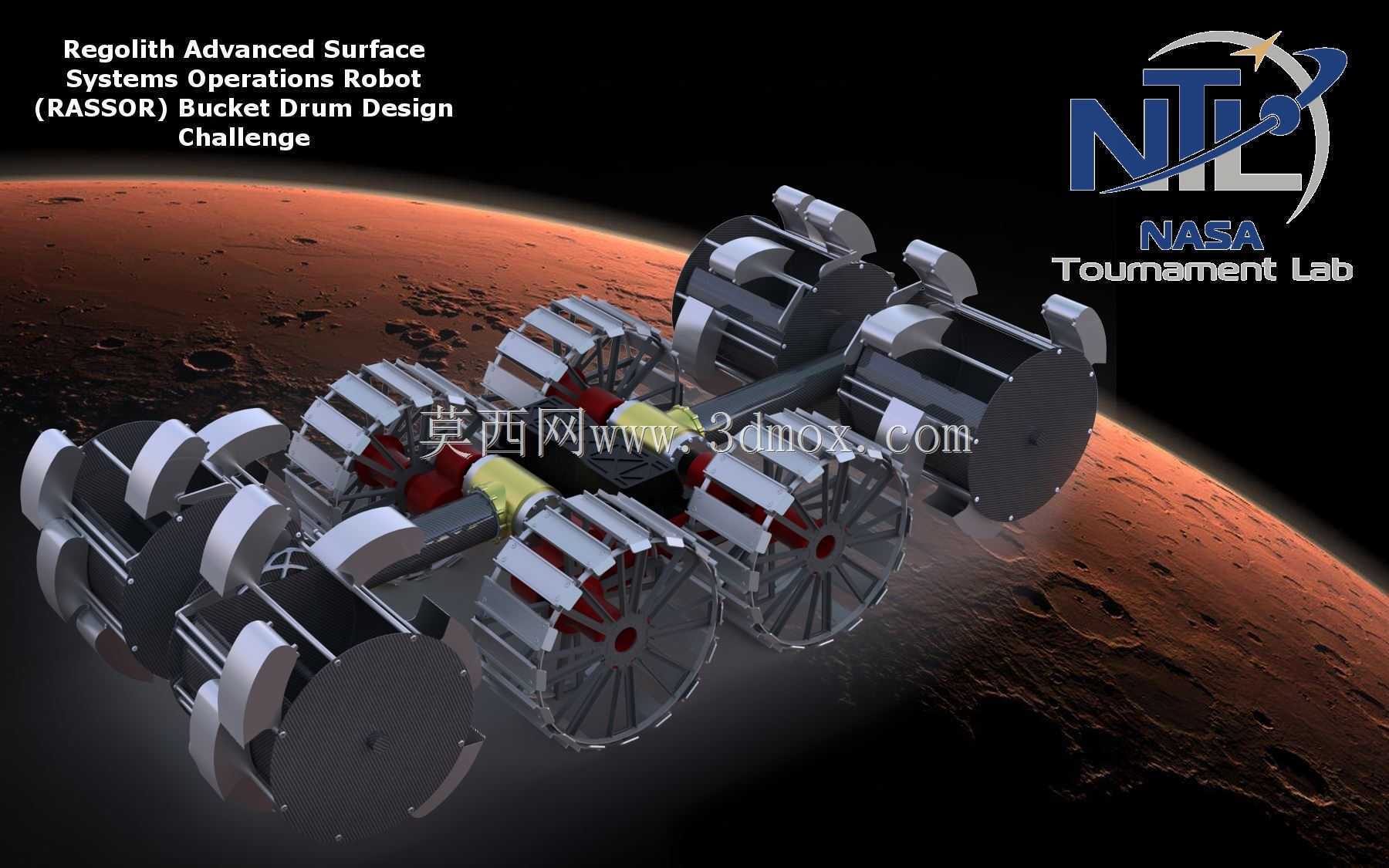
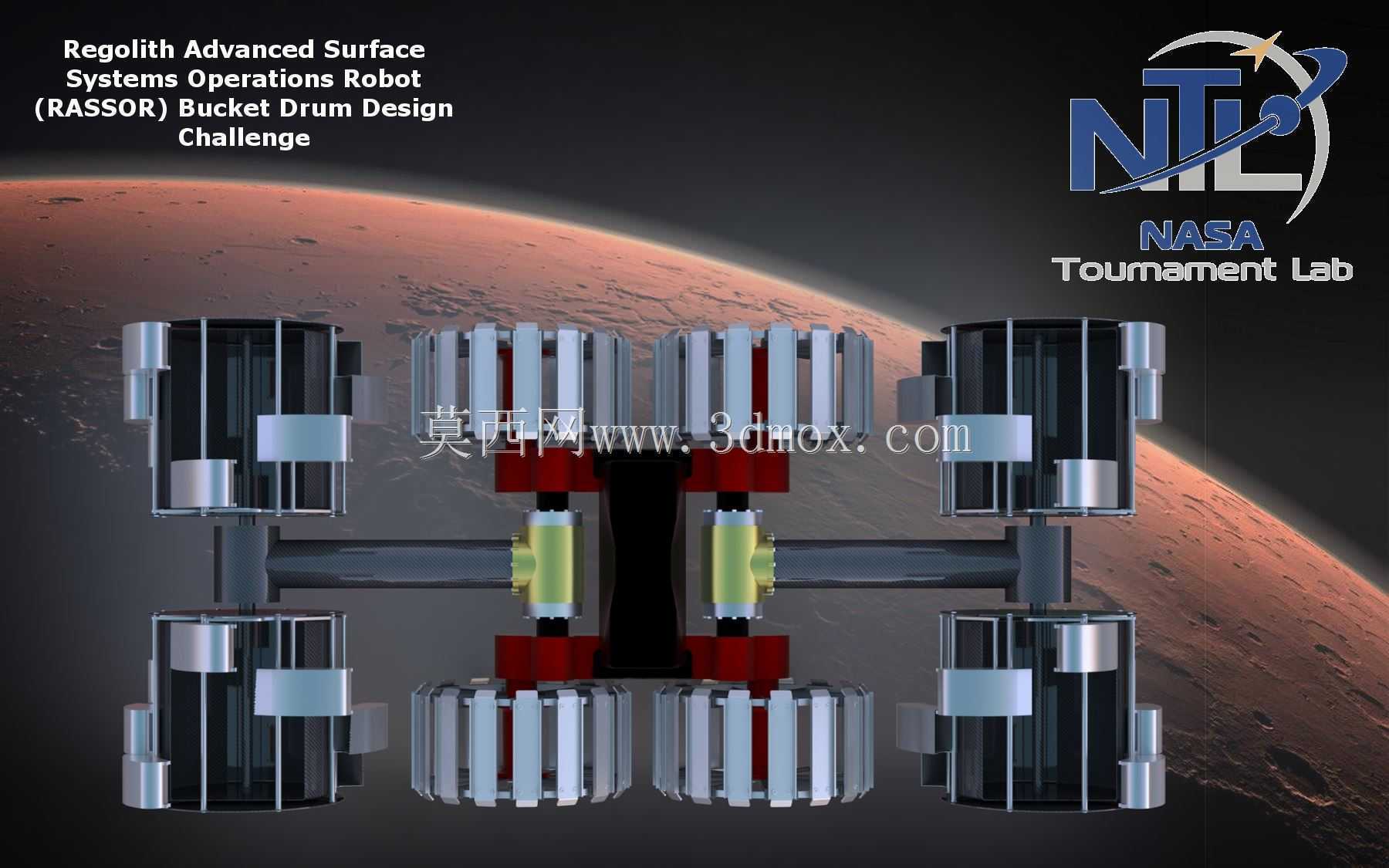
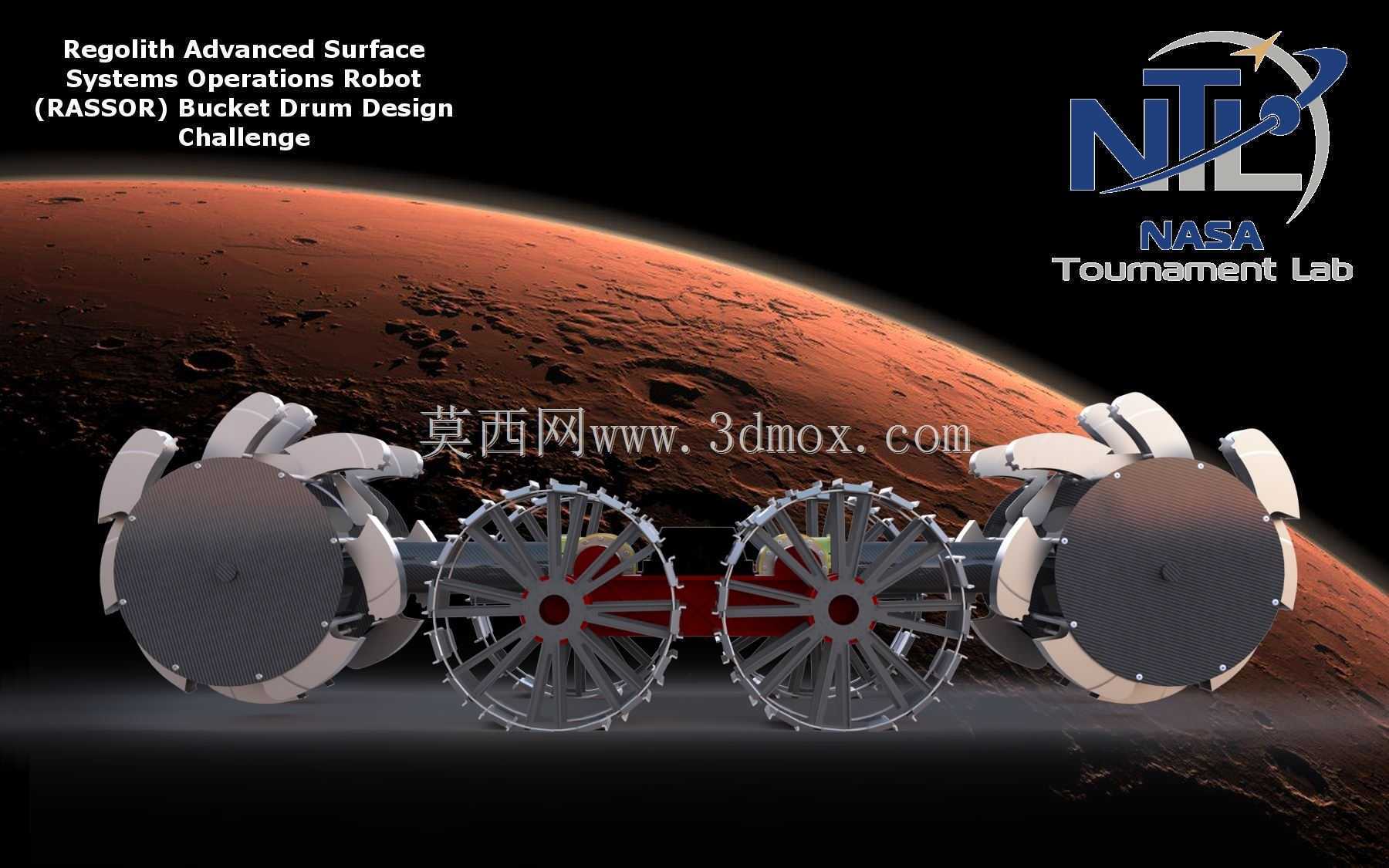
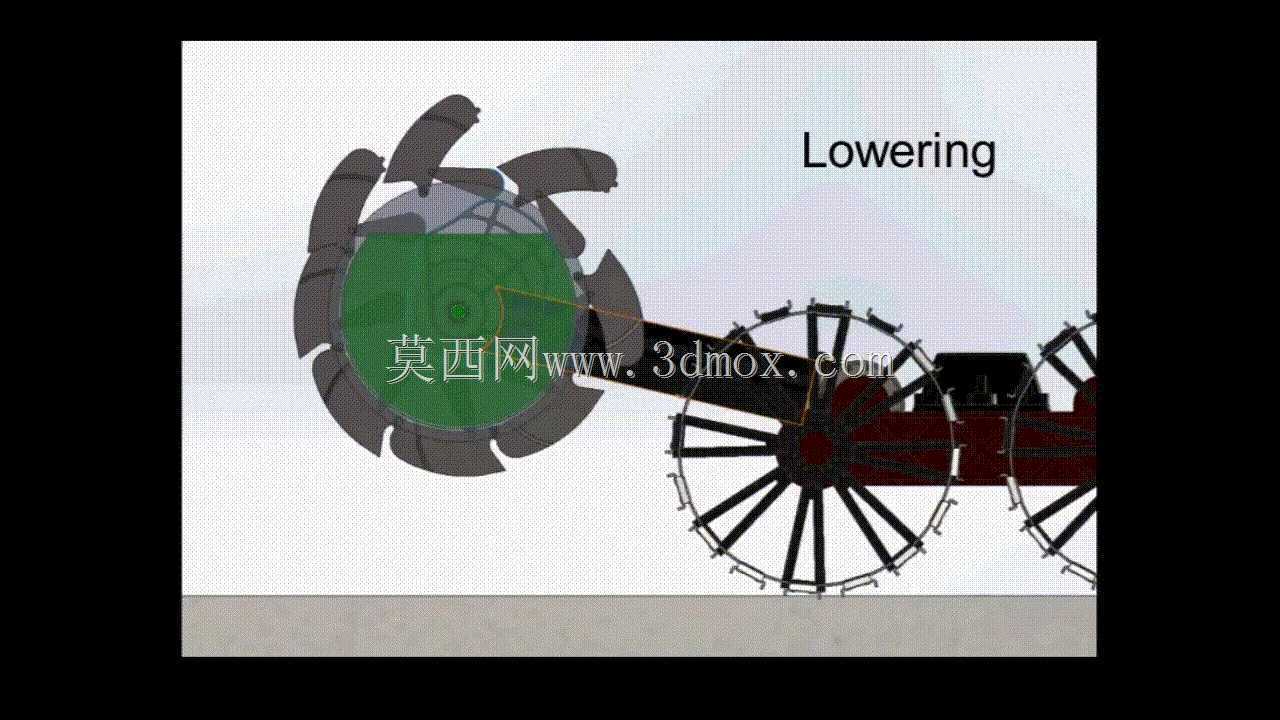
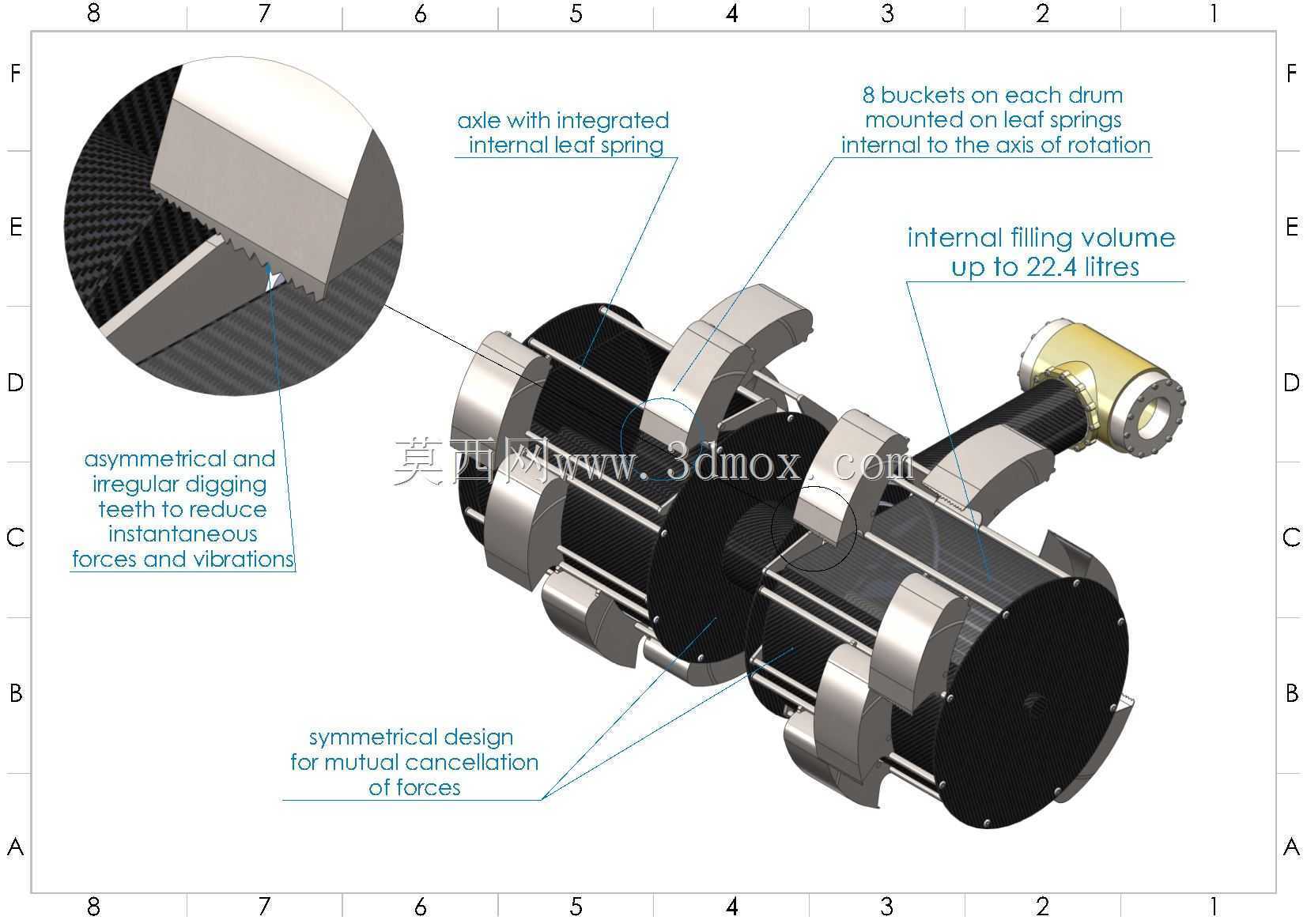
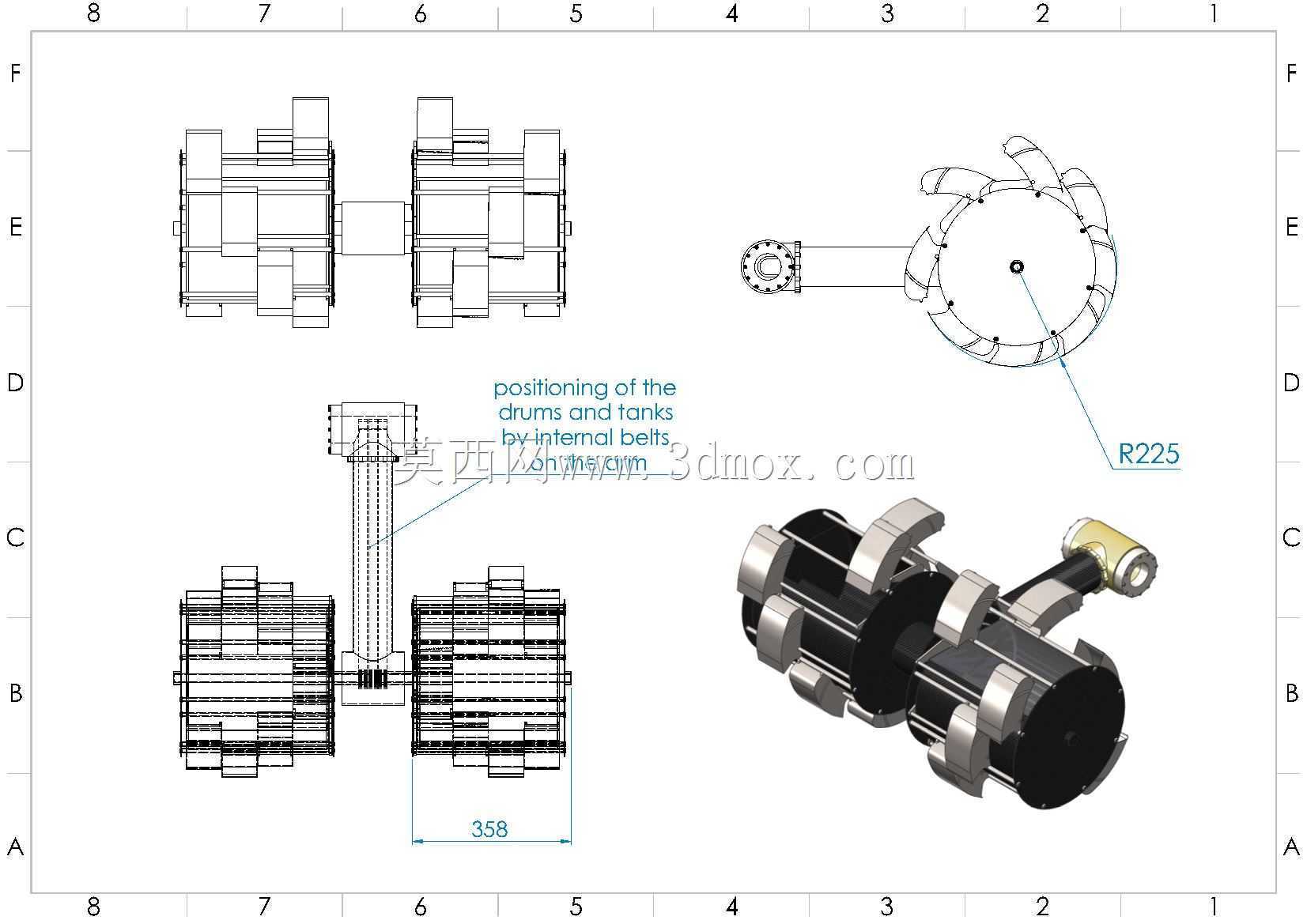
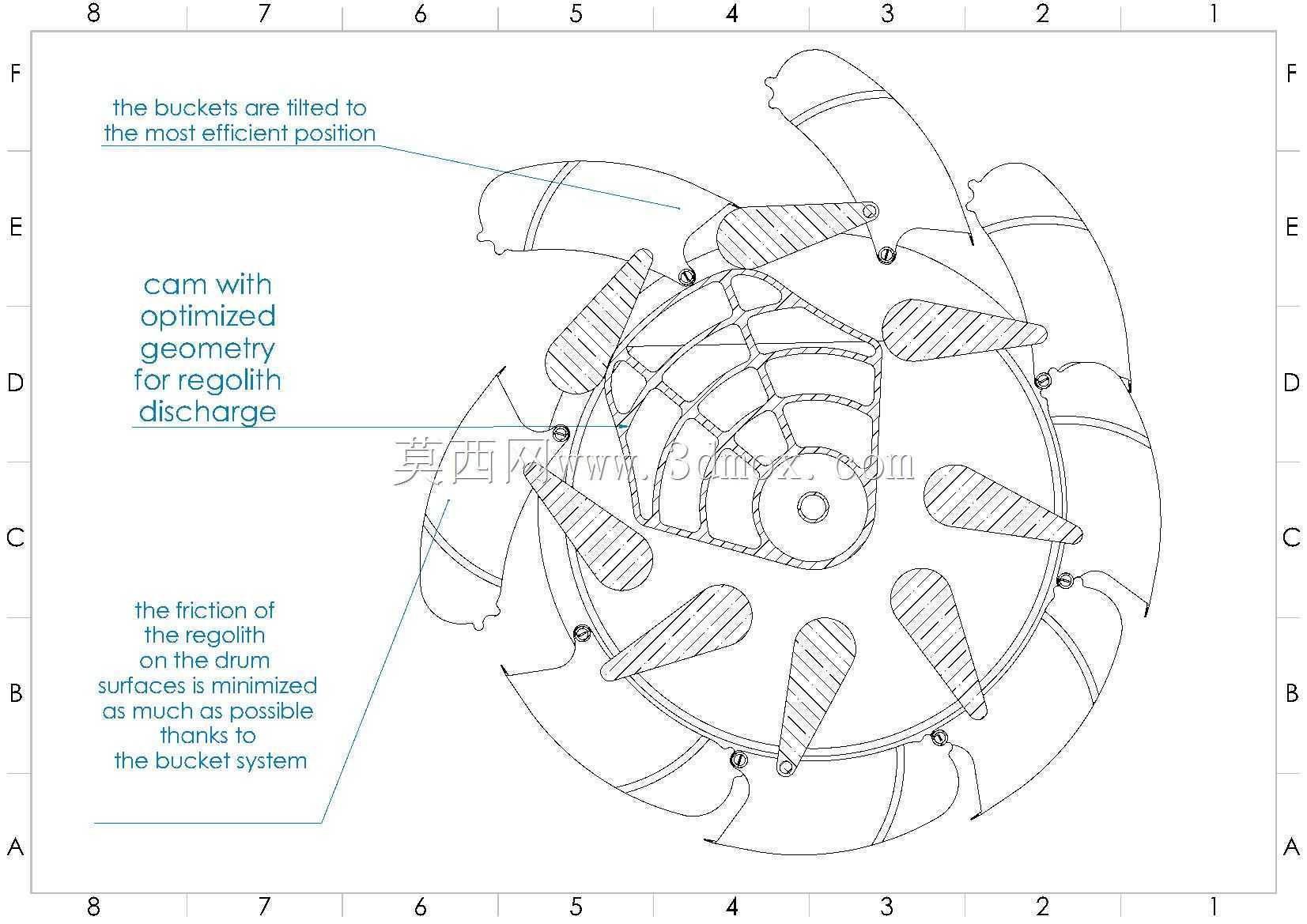


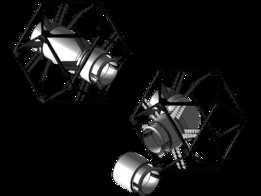
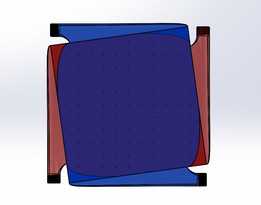
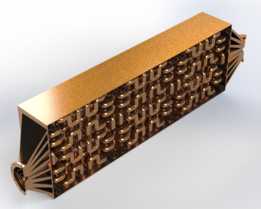
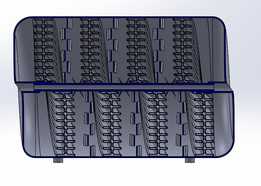
该系统的开发是为了在美国国家航空航天局风化层先进表面系统操作机器人(RASSOR)桶鼓设计挑战项目的框架内为风化层提取提供有效的解决方案。这里提出的解决方案显示了一种轻量级和高效的设计。旋转铲斗设计提供了一种将摩擦降至最低的解决方案。这些铲斗安装在轴上,由于轴上安装了集成的“片簧”,可以恢复到初始位置。主凸轮允许运动学优化中央储罐中的表土排放。在整个填充阶段,中央油箱保持水平位置,顶部有开口。然后,该罐由臂内的一条皮带启动,以启动排放。另一条皮带驱动铲斗旋转,依次清空。碳-钛-镁设计的3d可打印复合轴承,最大填充容量为每桶22.4升
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,Other