多重重力条件下垂直平移的RMA




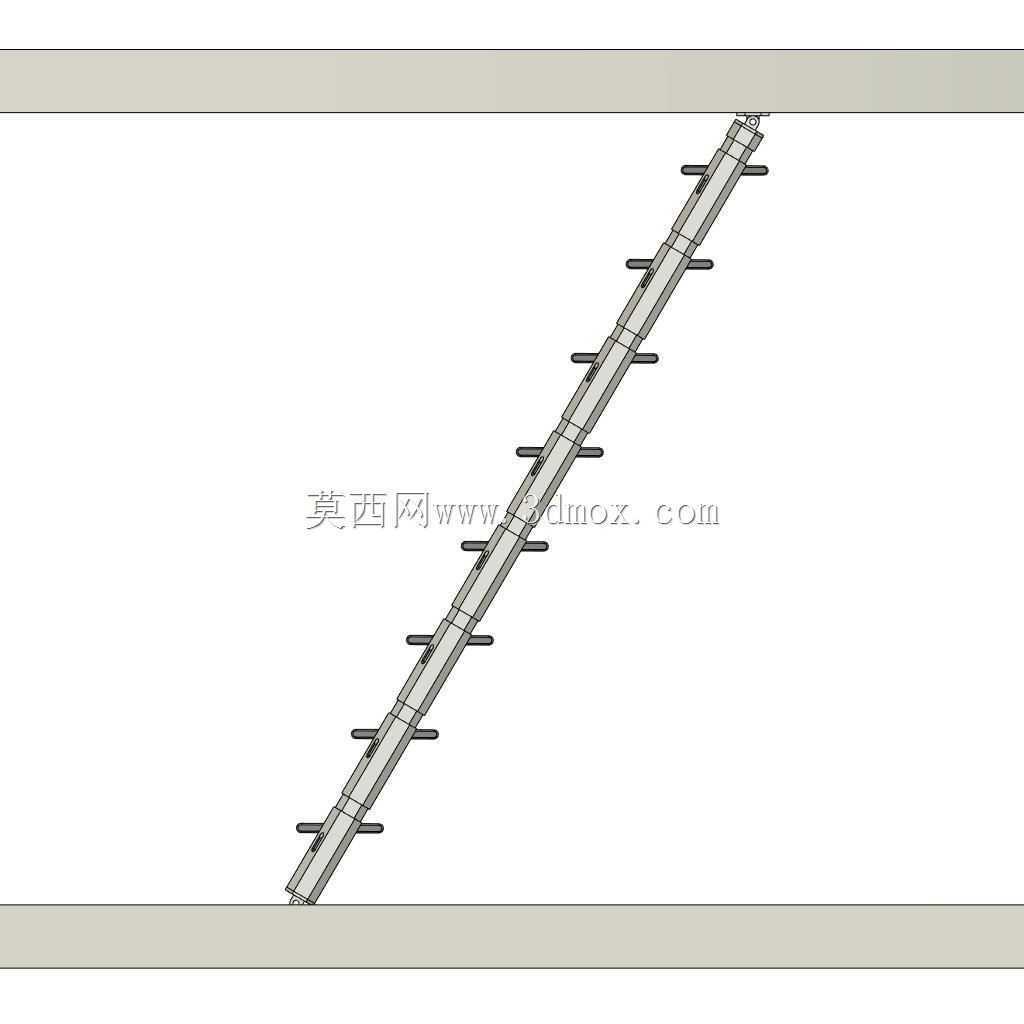
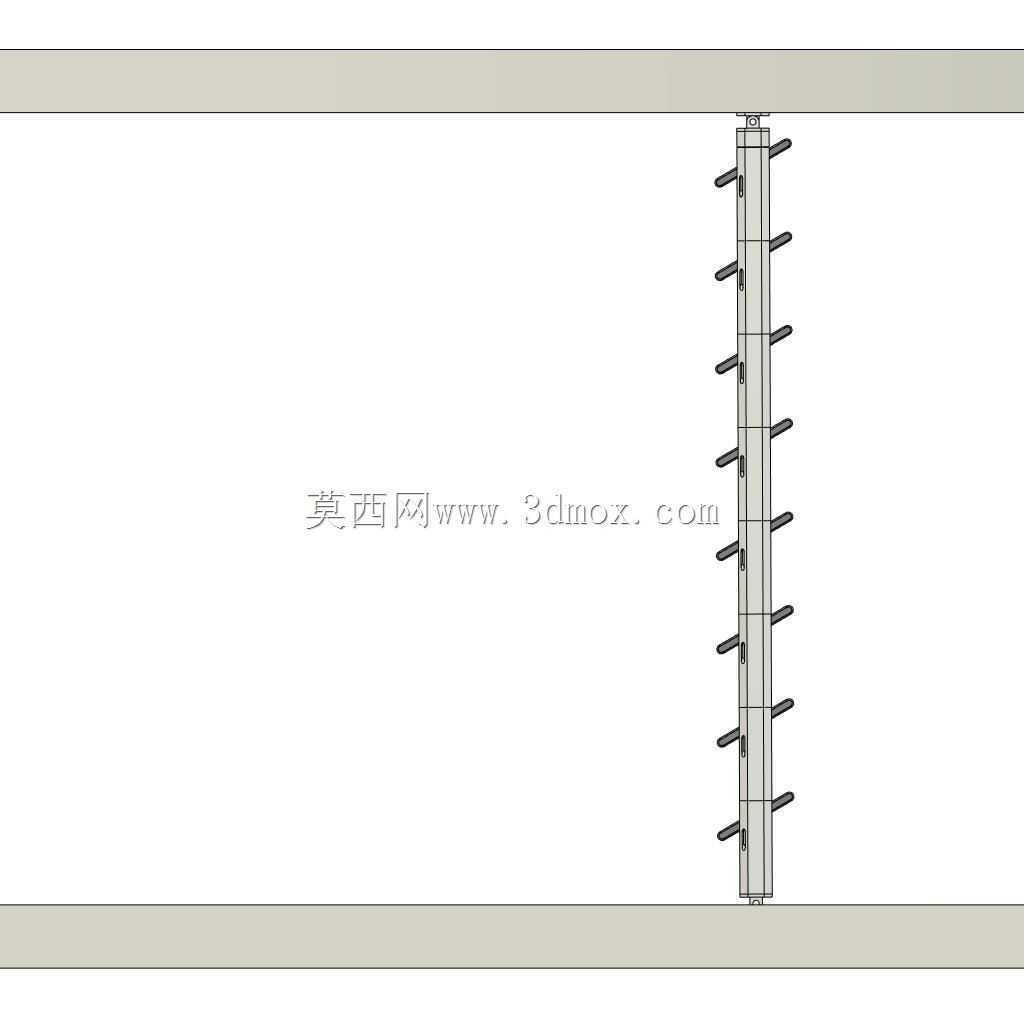



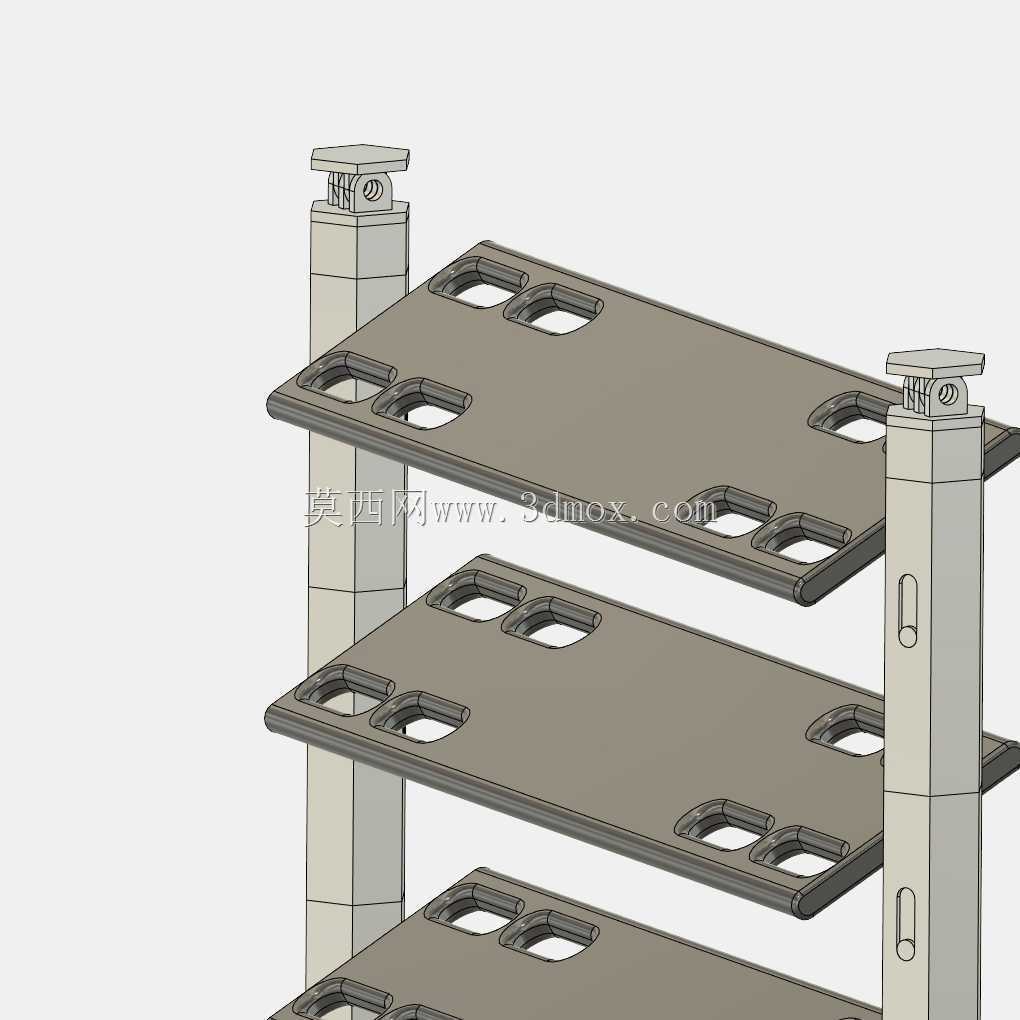






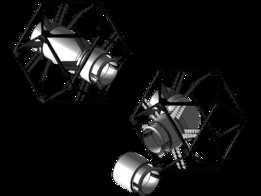
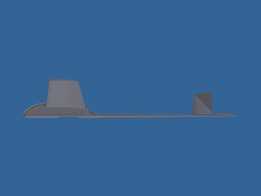
在本次比赛中提出的众多挑战中,在多种重力环境中有效和安全的垂直平移问题似乎是最困难的,因此这也是我首先应对的挑战。我提出的解决方案是一种多功能组合梯子/楼梯,可以有效地应对这一挑战。不幸的是,我参加这场比赛太晚了,无法完成完整的约束和移动系统的开发,但这是一个系统的开始,该系统将使宇航员能够安全舒适地在空间站/住所中导航。对于可能持续数月或数年的任务,任何RMA解决方案都必须符合人体工程学,并且长期舒适,这一点很重要。这意味着一个理想的系统将被集成到居住或基础结构中,不需要宇航员佩戴任何特殊的安全带、手套或鞋子来安全使用该系统。*注意*“该系统在0g、1/6g、3/8g和1g下运行时不需要重新配置或更改”的约束我解释为意味着不需要拆卸或更换零件,它就可以在不同的重力环境中工作。*该系统的工作原理如下:在0g环境中,梯子垂直存放,允许完全畅通无阻地进入舱口,并为宇航员提供从地板到天花板的把手,以便在操纵重量较轻的情况下使用。在重力环境中(1/6g、3/8g、1g),梯子会变成楼梯。为此,按下底部横档下方地板上的一个按钮,松开将梯子底部固定到位的锁。这允许梯子的底座沿着嵌入地板的两个通道滑动,直到它到达舱口开口的远端,并再次锁定到位,将其固定。这种新配置应在所有重力环境中使用,当然足够坚固,可以在1G的地球上进行训练。这种设计允许宇航员在地板之间轻松安全地垂直平移,即使他们的手完全被占用。通过不要求他们去任何特殊的安全带、鞋子或手套,他们可以专注于任务的任务,而不是如何在车站/住所周围移动
标签:
------分隔线----------------------------
- 上一篇:SL_ST挠性PID演示台-00
- 下一篇:tableduosbymsd

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering