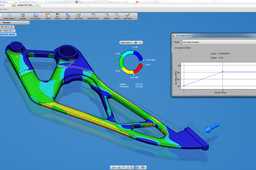
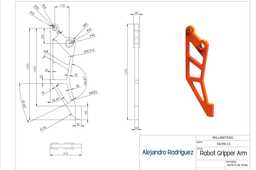
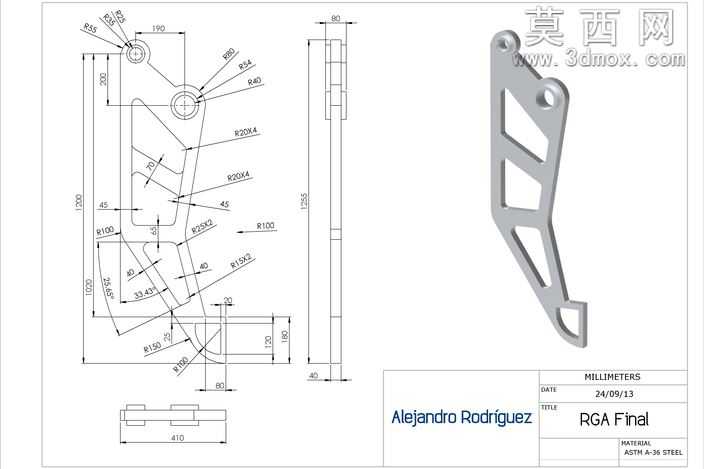
欧特克公司机器人手爪臂设计的挑战。最终的设计
*********************************************
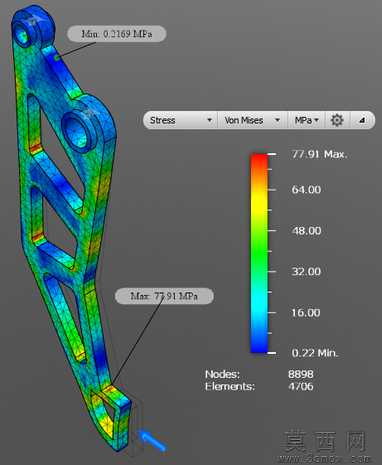
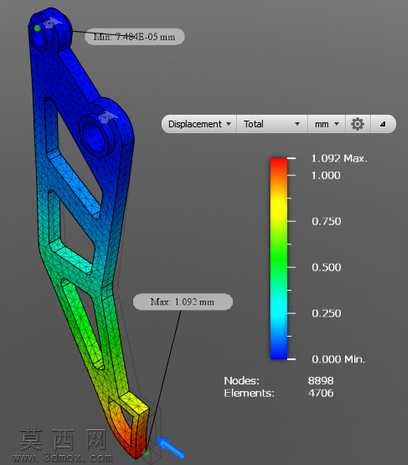
结果:
大体积 = 55.7 公斤
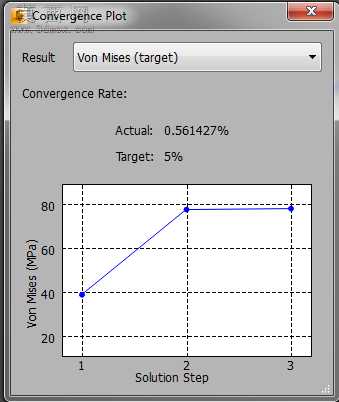
最大值。应力 (Von Mises) = 77.91 MPa。
最大位移 = 1.09 毫米
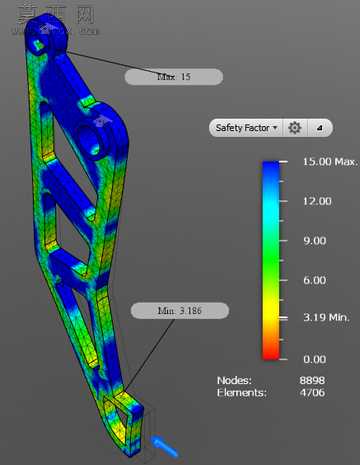
最小安全系数 = 3.19
***********************************************
我最后的设计。谢谢你到欧特克和 这两种的挑战。并祝大家好运。
标签:


- 模型大小 :1.9 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :