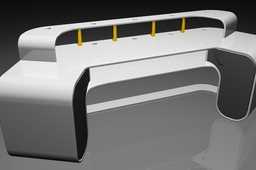
瓢虫





六足瓢虫
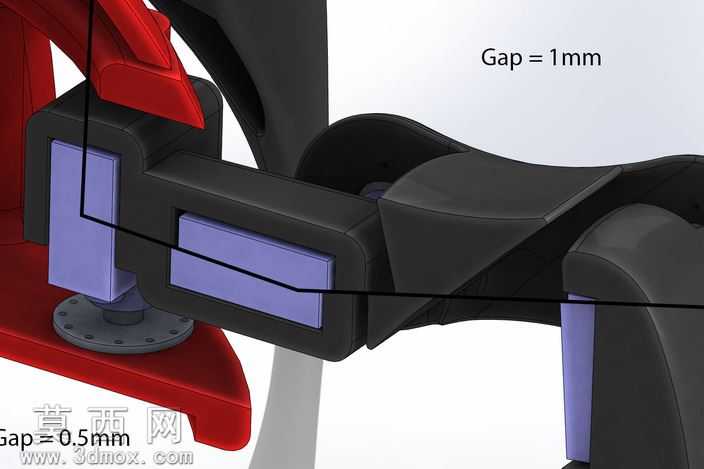
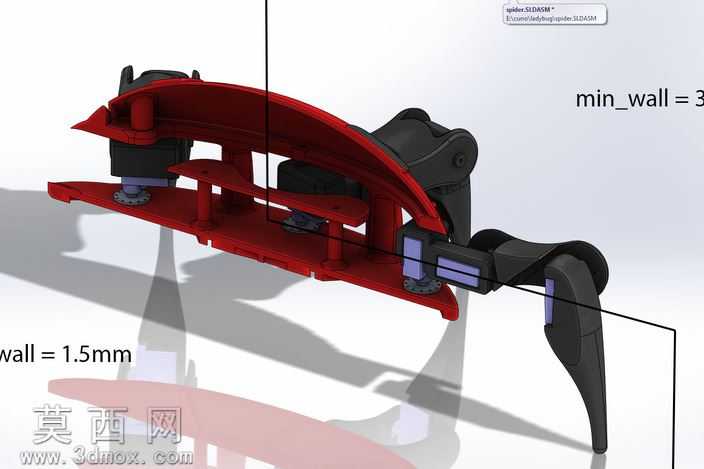
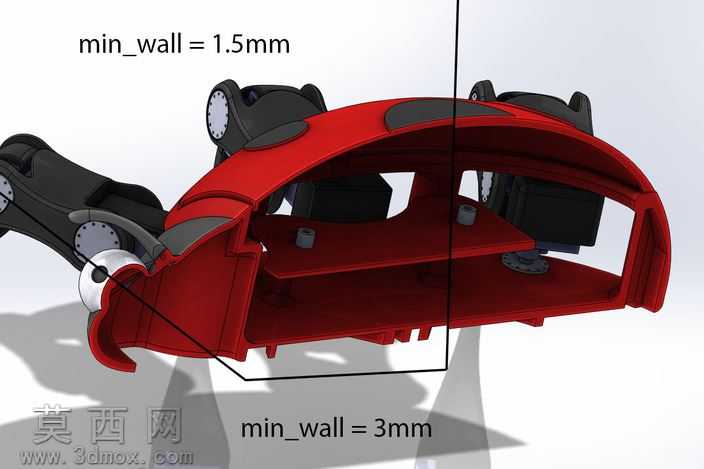
我试图让3D模型 parametrable
"equations.txt"中的变量值:
"差距"= 部件之间的分离
"min_wall"= 墙的最小厚度
运动学的六足 http://www.youtube.com/watch?v=ACaJE-fd9RU
-X 1 = 34.95 BotBoarduino $ http://www.lynxmotion.com/p-840-botboarduino.aspx
-X 1 = 19.95 PS2 机器人控制器 $ http://www.lynxmotion.com/p-552-ps2-robot-controller.aspx
-X 18 = 55.44 微型伺服箭头 4.3g/.8kg/12sec $ http://www.hobbyking.com/hobbyking/store/__3724__Arrow_4_3g_8kg_12sec_Micro_Servo.html
-Turnigy 粒 1000mAh 2S 20 C x 1 = 4.3$ http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=9170
总电: 110.34 (运输成本不包括)
-打印服务 500/350 厘米 3 (墙 3 毫米/1.5 m m) * 1.4cm3 / $ (autch!)
注意:
没有经历在机器人技术和电子
我创建了这个3D模型的 3D 打印事件挑战
标签:


- 模型大小 :34.37 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :